 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStudy of the Dynamic Coupling Term in Parallel Force/Velocity Actuated Systems
Feb 21, 2014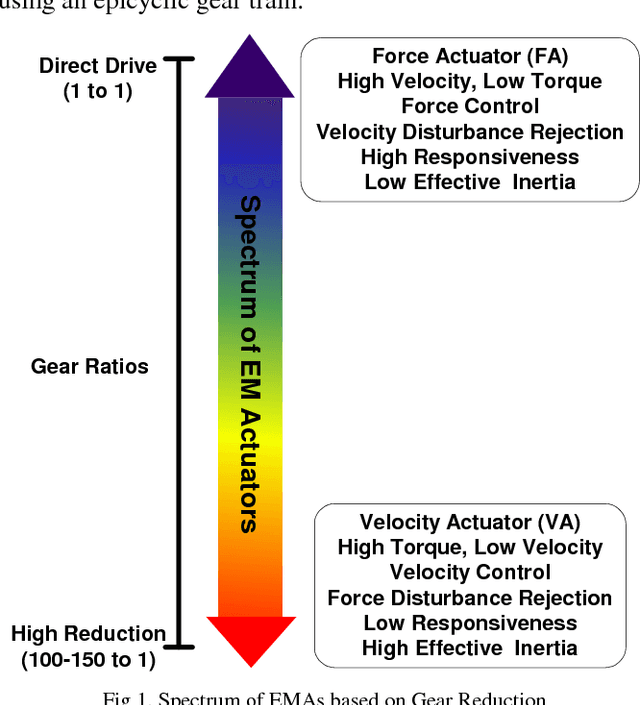
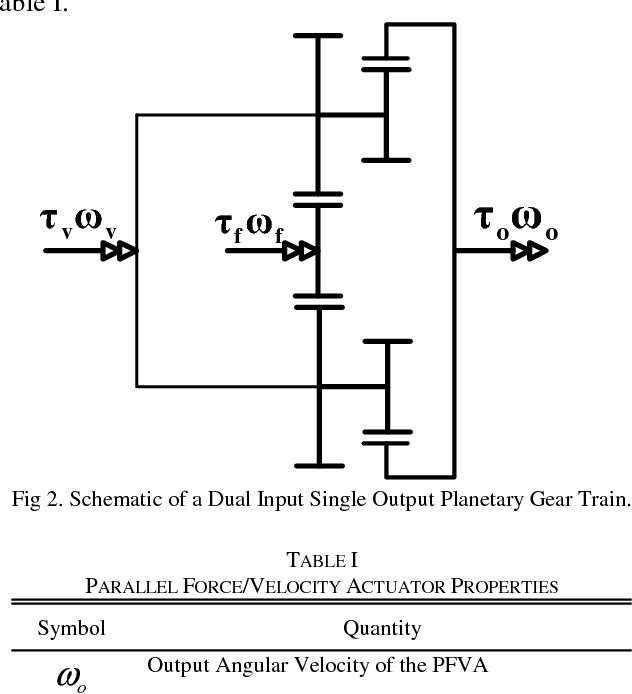
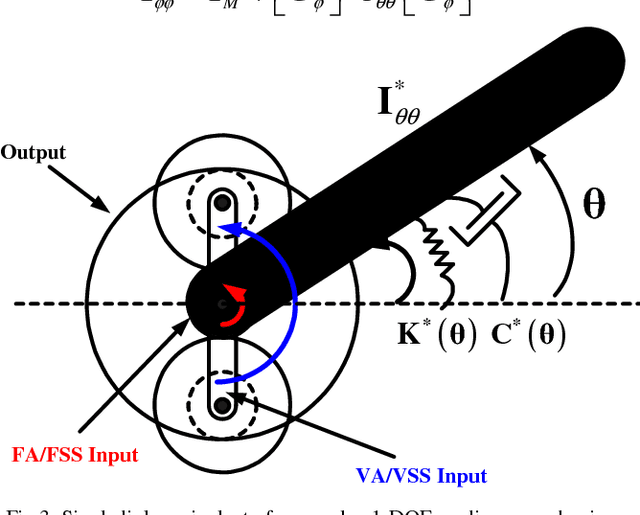
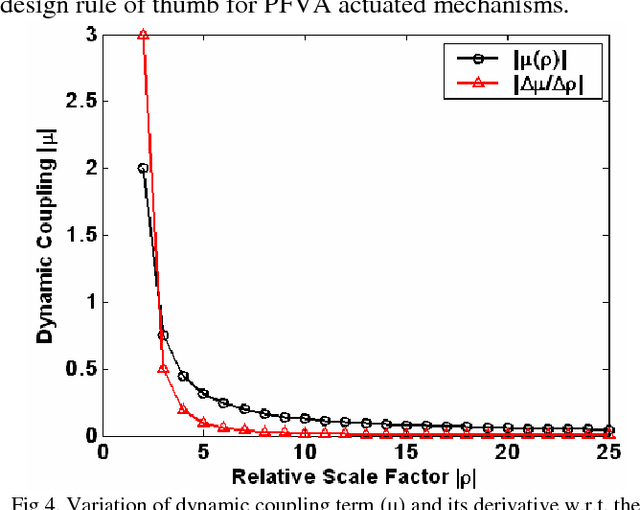
Presented in this paper is an actuator concept, called a Parallel Force/Velocity Actuator (PFVA), that combines two fundamentally distinct actuators (one using low gear reduction or even direct drive, which we will call a Force Actuator (FA) and the other with a high reduction gear train that we will refer to as a Velocity Actuator (VA)). The objective of this work is to evaluate the effect of the relative scale factor, RSF, (ratio of gear reductions) between these inputs on their dynamic coupling. We conceptually describe a Parallel Force/Velocity Actuator (PFVA) based on a Dual-Input-Single- Output (DISO) epicyclic gear train. We then present an analytical formulation for the variation of the dynamic coupling term w.r.t. RSF. Conclusions from this formulation are illustrated through a numerical example involving a 1-DOF four-bar linkage. It is shown, both analytically and numerically, that as we increase the RSF, the two inputs to the PFVA are decoupled w.r.t. the inertia torques. This understanding can serve as an important design guideline for PFVAs. The paper also presents two limitations of this study and suggests future work based on these caveats.