 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Woofs to Words: Towards Intelligent Robotic Guide Dogs with Verbal Communication
Mar 13, 2026Assistive robotics is an important subarea of robotics that focuses on the well-being of people with disabilities. A robotic guide dog is an assistive quadruped robot that helps visually impaired people in obstacle avoidance and navigation. Enabling language capabilities for robotic guide dogs goes beyond naively adding an existing dialog system onto a mobile robot. The novel challenges include grounding language in the dynamically changing environment and improving spatial awareness for the human handler. To address those challenges, we develop a novel dialog system for robotic guide dogs that uses LLMs to verbalize both navigational plans and scenes. The goal is to enable verbal communication for collaborative decision-making within the handler-robot team. In experiments, we conducted a human study to evaluate different verbalization strategies and a simulation study to assess the efficiency and accuracy in navigation tasks.
Seeing-Eye Quadruped Navigation with Force Responsive Locomotion Control
Sep 08, 2023



Seeing-eye robots are very useful tools for guiding visually impaired people, potentially producing a huge societal impact given the low availability and high cost of real guide dogs. Although a few seeing-eye robot systems have already been demonstrated, none considered external tugs from humans, which frequently occur in a real guide dog setting. In this paper, we simultaneously train a locomotion controller that is robust to external tugging forces via Reinforcement Learning (RL), and an external force estimator via supervised learning. The controller ensures stable walking, and the force estimator enables the robot to respond to the external forces from the human. These forces are used to guide the robot to the global goal, which is unknown to the robot, while the robot guides the human around nearby obstacles via a local planner. Experimental results in simulation and on hardware show that our controller is robust to external forces, and our seeing-eye system can accurately detect force direction. We demonstrate our full seeing-eye robot system on a real quadruped robot with a blindfolded human. The video can be seen at our project page: https://bu-air-lab.github.io/guide_dog/
Learning Quadruped Locomotion Policies with Reward Machines
Jul 23, 2021


Legged robots have been shown to be effective in navigating unstructured environments. Although there has been much success in learning locomotion policies for quadruped robots, there is little research on how to incorporate human knowledge to facilitate this learning process. In this paper, we demonstrate that human knowledge in the form of LTL formulas can be applied to quadruped locomotion learning within a Reward Machine (RM) framework. Experimental results in simulation show that our RM-based approach enables easily defining diverse locomotion styles, and efficiently learning locomotion policies of the defined styles.
Adversarial Model Extraction on Graph Neural Networks
Dec 16, 2019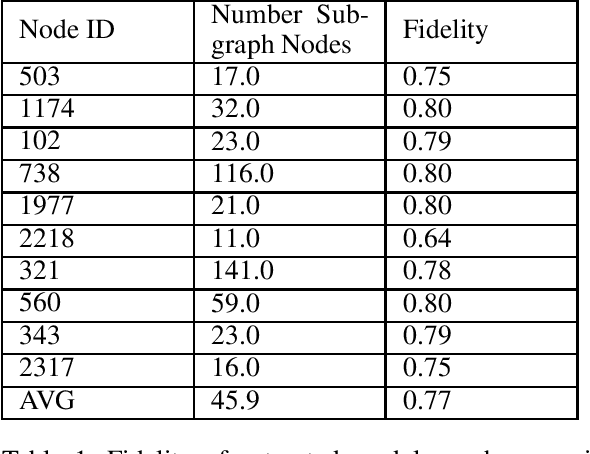
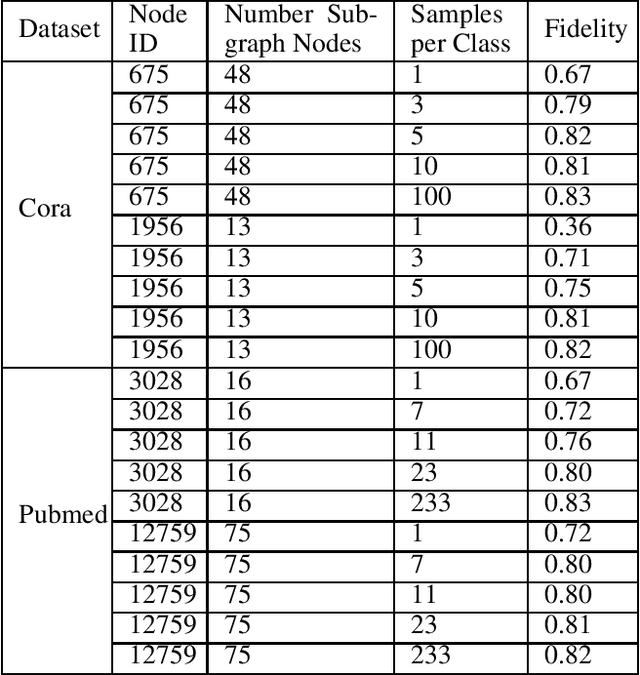
Along with the advent of deep neural networks came various methods of exploitation, such as fooling the classifier or contaminating its training data. Another such attack is known as model extraction, where provided API access to some black box neural network, the adversary extracts the underlying model. This is done by querying the model in such a way that the underlying neural network provides enough information to the adversary to be reconstructed. While several works have achieved impressive results with neural network extraction in the propositional domain, this problem has not yet been considered over the relational domain, where data samples are no longer considered to be independent and identically distributed (iid). Graph Neural Networks (GNNs) are a popular deep learning framework to perform machine learning tasks over relational data. In this work, we formalize an instance of GNN extraction, present a solution with preliminary results, and discuss our assumptions and future directions.