 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevealing the influence of participant failures on model quality in cross-silo Federated Learning
Mar 26, 2026Federated Learning (FL) is a paradigm for training machine learning (ML) models in collaborative settings while preserving participants' privacy by keeping raw data local. A key requirement for the use of FL in production is reliability, as insufficient reliability can compromise the validity, stability, and reproducibility of learning outcomes. FL inherently operates as a distributed system and is therefore susceptible to crash failures, network partitioning, and other fault scenarios. Despite this, the impact of such failures on FL outcomes has not yet been studied systematically. In this paper, we address this gap by investigating the impact of missing participants in FL. To this end, we conduct extensive experiments on image, tabular, and time-series data and analyze how the absence of participants affects model performance, taking into account influencing factors such as data skewness, different availability patterns, and model architectures. Furthermore, we examine scenario-specific aspects, including the utility of the global model for missing participants. Our experiments provide detailed insights into the effects of various influencing factors. In particular, we show that data skewness has a strong impact, often leading to overly optimistic model evaluations and, in some cases, even altering the effects of other influencing factors.
Analyzing the Impact of Participant Failures in Cross-Silo Federated Learning
Nov 18, 2025Federated learning (FL) is a new paradigm for training machine learning (ML) models without sharing data. While applying FL in cross-silo scenarios, where organizations collaborate, it is necessary that the FL system is reliable; however, participants can fail due to various reasons (e.g., communication issues or misconfigurations). In order to provide a reliable system, it is necessary to analyze the impact of participant failures. While this problem received attention in cross-device FL where mobile devices with limited resources participate, there is comparatively little research in cross-silo FL. Therefore, we conduct an extensive study for analyzing the impact of participant failures on the model quality in the context of inter-organizational cross-silo FL with few participants. In our study, we focus on analyzing generally influential factors such as the impact of the timing and the data as well as the impact on the evaluation, which is important for deciding, if the model should be deployed. We show that under high skews the evaluation is optimistic and hides the real impact. Furthermore, we demonstrate that the timing impacts the quality of the trained model. Our results offer insights for researchers and software architects aiming to build robust FL systems.
Supporting UAVs with Edge Computing: A Review of Opportunities and Challenges
Oct 18, 2023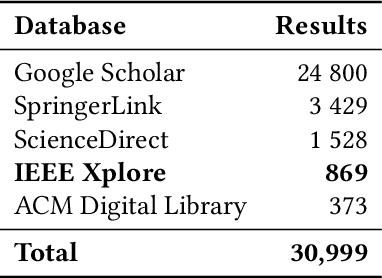
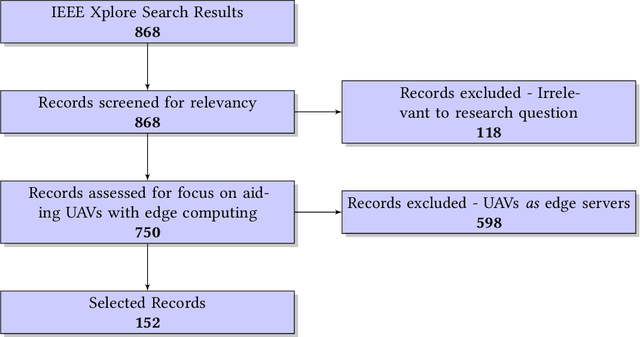
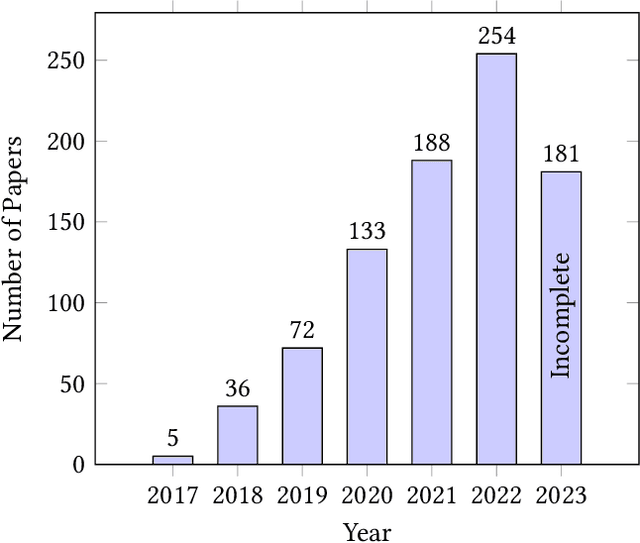
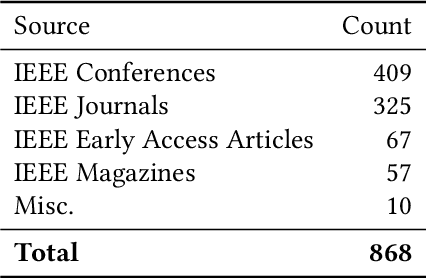
Over the last years, Unmanned Aerial Vehicles (UAVs) have seen significant advancements in sensor capabilities and computational abilities, allowing for efficient autonomous navigation and visual tracking applications. However, the demand for computationally complex tasks has increased faster than advances in battery technology. This opens up possibilities for improvements using edge computing. In edge computing, edge servers can achieve lower latency responses compared to traditional cloud servers through strategic geographic deployments. Furthermore, these servers can maintain superior computational performance compared to UAVs, as they are not limited by battery constraints. Combining these technologies by aiding UAVs with edge servers, research finds measurable improvements in task completion speed, energy efficiency, and reliability across multiple applications and industries. This systematic literature review aims to analyze the current state of research and collect, select, and extract the key areas where UAV activities can be supported and improved through edge computing.
Predicting Temporal Aspects of Movement for Predictive Replication in Fog Environments
Jun 05, 2023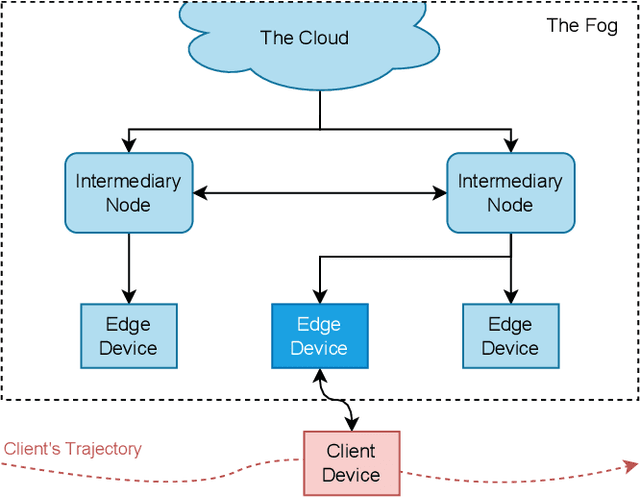
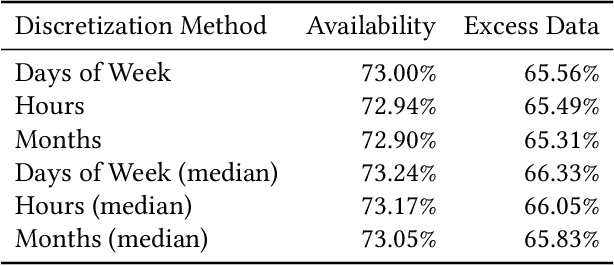
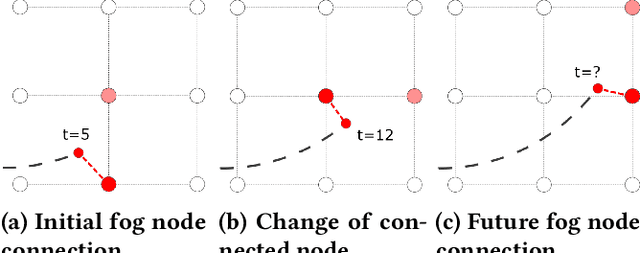
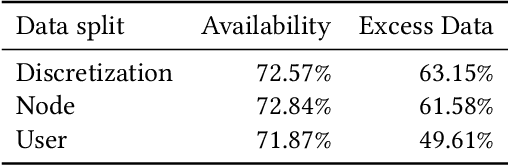
To fully exploit the benefits of the fog environment, efficient management of data locality is crucial. Blind or reactive data replication falls short in harnessing the potential of fog computing, necessitating more advanced techniques for predicting where and when clients will connect. While spatial prediction has received considerable attention, temporal prediction remains understudied. Our paper addresses this gap by examining the advantages of incorporating temporal prediction into existing spatial prediction models. We also provide a comprehensive analysis of spatio-temporal prediction models, such as Deep Neural Networks and Markov models, in the context of predictive replication. We propose a novel model using Holt-Winter's Exponential Smoothing for temporal prediction, leveraging sequential and periodical user movement patterns. In a fog network simulation with real user trajectories our model achieves a 15% reduction in excess data with a marginal 1% decrease in data availability.
CycleSense: Detecting Near Miss Incidents in Bicycle Traffic from Mobile Motion Sensors
Apr 21, 2022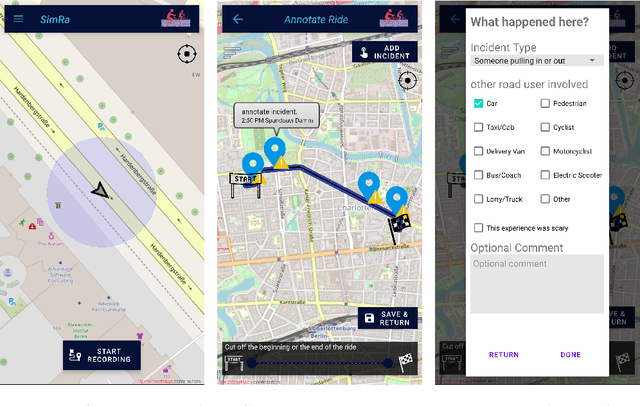

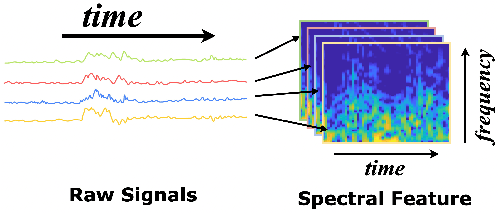
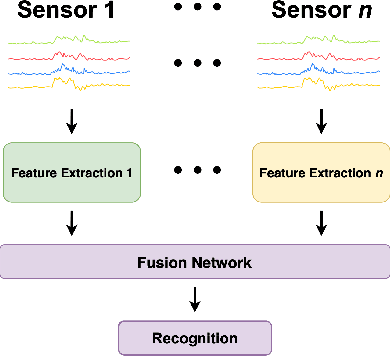
In cities worldwide, cars cause health and traffic problems which could be partly mitigated through an increased modal share of bicycles. Many people, however, avoid cycling due to a lack of perceived safety. For city planners, addressing this is hard as they lack insights into where cyclists feel safe and where they do not. To gain such insights, we have in previous work proposed the crowdsourcing platform SimRa, which allows cyclists to record their rides and report near miss incidents via a smartphone app. In this paper, we present CycleSense, a combination of signal processing and Machine Learning techniques, which partially automates the detection of near miss incidents. Using the SimRa data set, we evaluate CycleSense by comparing it to a baseline method used by SimRa and show that it significantly improves incident detection.