 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Path Planning and Task Allocation Algorithm for Boolean Specifications
Jun 05, 2025This paper presents a novel path-planning and task assignment algorithm for multi-robot systems that should fulfill a global Boolean specification. The proposed method is based on Integer Linear Programming (ILP) formulations, which are combined with structural insights from Petri nets to improve scalability and computational efficiency. By proving that the \emph{constraint matrix} is totally unimodular (TU) for certain classes of problems, the ILP formulation can be relaxed into a Linear Programming (LP) problem without losing the integrality of the solution. This relaxation eliminates complex combinatorial techniques, significantly reducing computational overhead and thus ensuring scalability for large-scale systems. Using the approach proposed in this paper, we can solve path-planning problems for teams made up to 500 robots. The method guarantees computational tractability, handles collision avoidance and reduces computational demands through iterative LP optimization techniques. Case studies demonstrate the efficiency of the algorithm in generating scalable, collision-free paths for large robot teams navigating in complex environments. While the conservative nature of collision avoidance introduces additional constraints, and thus, computational requirements, the solution remains practical and impactful for diverse applications. The algorithm is particularly applicable to real-world scenarios, including warehouse logistics where autonomous robots must efficiently coordinate tasks or search-and-rescue operations in various environments. This work contributes both theoretically and practically to scalable multi-robot path planning and task allocation, offering an efficient framework for coordinating autonomous agents in shared environments.
Multi-robot Motion Planning based on Nets-within-Nets Modeling and Simulation
Apr 18, 2023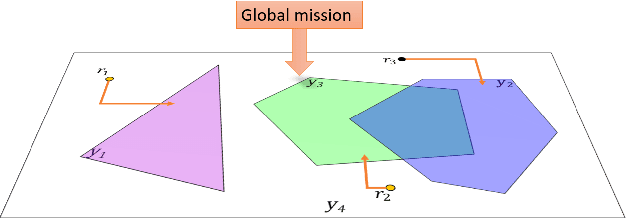



This paper focuses on designing motion plans for a heterogeneous team of robots that has to cooperate in fulfilling a global mission. The robots move in an environment containing some regions of interest, and the specification for the whole team can include avoidances, visits, or sequencing when entering these regions of interest. The specification is expressed in terms of a Petri net corresponding to an automaton, while each robot is also modeled by a state machine Petri net. With respect to existing solutions for related problems, the current work brings the following contributions. First, we propose a novel model, denoted {High-Level robot team Petri Net (HLPN) system, for incorporating the specification and the robot models into the Nets-within-Nets paradigm. A guard function, named Global Enabling Function (gef), is designed to synchronize the firing of transitions such that the robot motions do not violate the specification. Then, the solution is found by simulating the HPLN system in a specific software tool that accommodates Nets-within-Nets. An illustrative example based on a Linear Temporal Logic (LTL) mission is described throughout the paper, complementing the proposed rationale of the framework.
On Multi-Robot Path Planning Based on Petri Net Models and LTL specifications
Nov 08, 2022This work considers the path planning problem for a team of identical robots evolving in a known environment. The robots should satisfy a global specification given as a Linear Temporal Logic (LTL) formula over a set of regions of interest. The proposed method exploits the advantages of Petri net models for the team of robots and B\"uchi automata modeling the specification. The approach in this paper consists in combining the two models into one, denoted Composed Petri net and use it to find a sequence of action movements for the mobile robots, providing collision free trajectories to fulfill the specification. The solution results from a set of Mixed Integer Linear Programming (MILP) problems. The main advantage of the proposed solution is the completeness of the algorithm, meaning that a solution is found when exists, this representing the key difference with our previous work in [1]. The simulations illustrate comparison results between current and previous approaches, focusing on the computational complexity.