 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Control using Control Lyapunov Function and Hamilton-Jacobi Reachability
Apr 08, 2024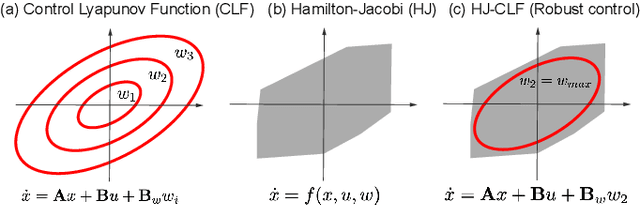
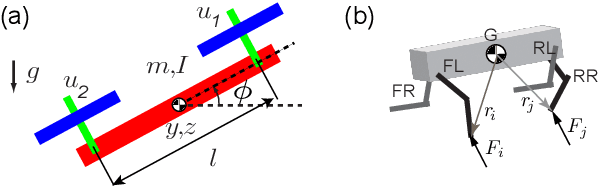
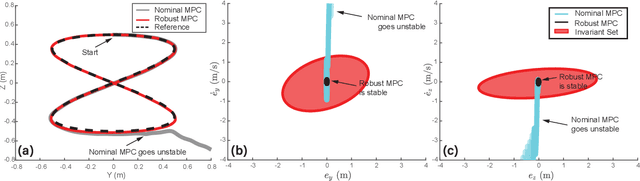
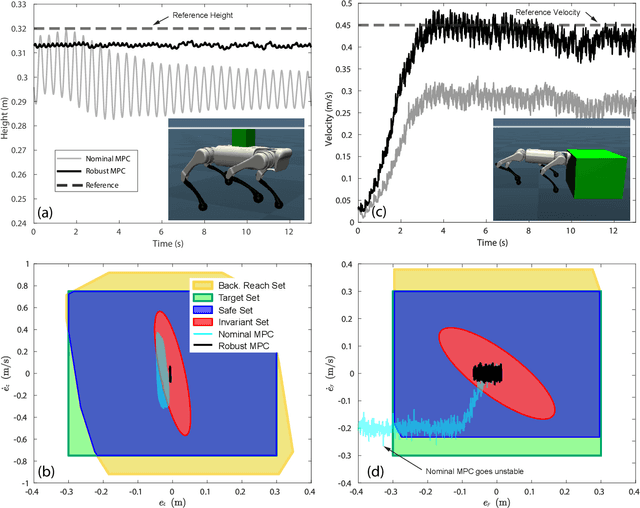
The paper presents a robust control technique that combines the Control Lyapunov function and Hamilton-Jacobi Reachability to compute a controller and its Region of Attraction (ROA). The Control Lyapunov function uses a linear system model with an assumed additive uncertainty to calculate a control gain and the level sets of the ROA as a function of the uncertainty. Next, Hamilton-Jacobi reachability uses the nonlinear model with the modeled uncertainty, which need not be additive, to compute the backward reachable set (BRS). Finally, by juxtaposing the level sets of the ROA with BRS, we can calculate the worst-case additive disturbance and the ROA of the nonlinear model. We illustrate our approach on a 2D quadcopter tracking trajectory and a 2D quadcopter with height and velocity regulation in simulation.