 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Path Planning Via Genetic Programming
Dec 19, 2019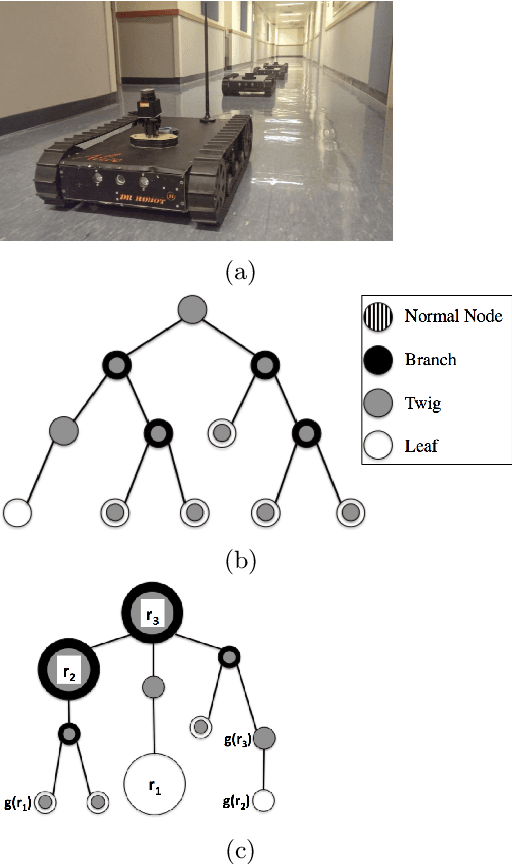

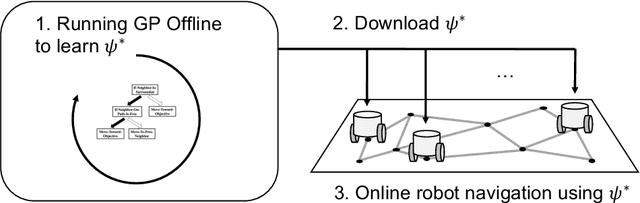
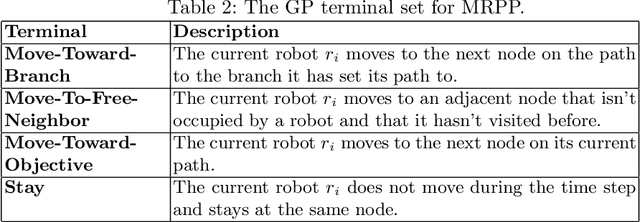
This paper presents a Genetic Programming (GP) approach to solving multi-robot path planning (MRPP) problems in single-lane workspaces, specifically those easily mapped to graph representations. GP's versatility enables this approach to produce programs optimizing for multiple attributes rather than a single attribute such as path length or completeness. When optimizing for the number of time steps needed to solve individual MRPP problems, the GP constructed programs outperformed complete MRPP algorithms, i.e. Push-Swap-Wait (PSW), by $54.1\%$. The GP constructed programs also consistently outperformed PSW in solving problems that did not meet PSW's completeness conditions. Furthermore, the GP constructed programs exhibited a greater capacity for scaling than PSW as the number of robots navigating within an MRPP environment increased. This research illustrates the benefits of using Genetic Programming for solving individual MRPP problems, including instances in which the number of robots exceeds the number of leaves in the tree-modeled workspace.