Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptical Navigation in Unstructured Dynamic Railroad Environments
Jul 07, 2020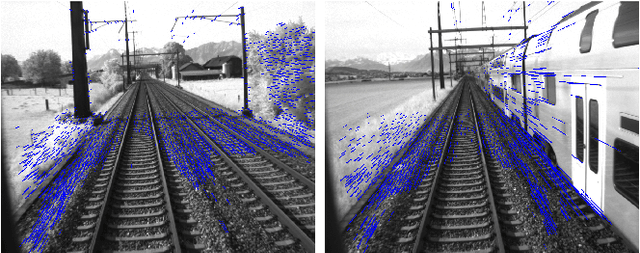
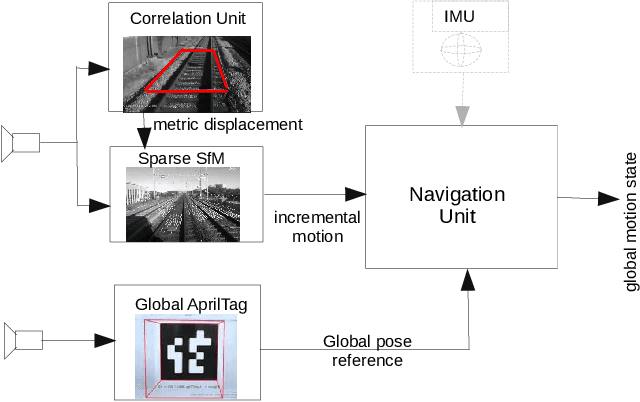
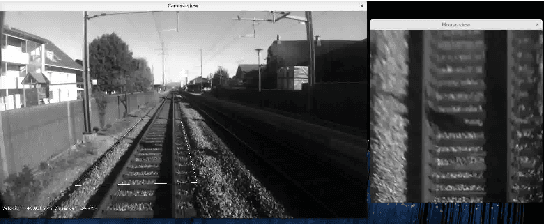
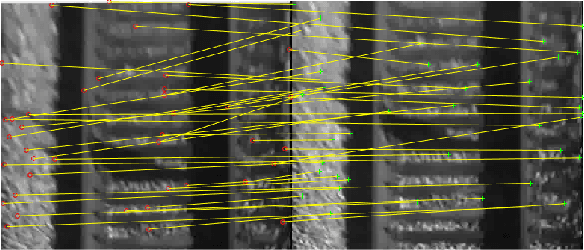
We present an approach for optical navigation in unstructured, dynamic railroad environments. We propose a way how to cope with the estimation of the train motion from sole observations of the planar track bed. The occasional significant occlusions during the operation of the train limit the available observation to this difficult to track, repetitive area. This approach is a step towards replacement of the expensive train management infrastructure with local intelligence on the train for SmartRail 4.0. We derive our approach for robust estimation of translation and rotation in this difficult environments and provide experimental validation of the approach on real rail scenarios.
Via