 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHARMONIC: A Content-Centric Cognitive Robotic Architecture
Sep 16, 2025This paper introduces HARMONIC, a cognitive-robotic architecture designed for robots in human-robotic teams. HARMONIC supports semantic perception interpretation, human-like decision-making, and intentional language communication. It addresses the issues of safety and quality of results; aims to solve problems of data scarcity, explainability, and safety; and promotes transparency and trust. Two proof-of-concept HARMONIC-based robotic systems are demonstrated, each implemented in both a high-fidelity simulation environment and on physical robotic platforms.
HARMONIC: Cognitive and Control Collaboration in Human-Robotic Teams
Sep 26, 2024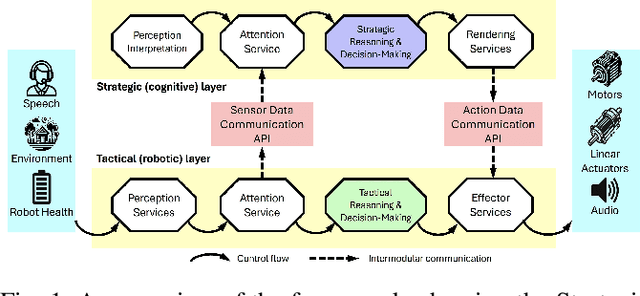
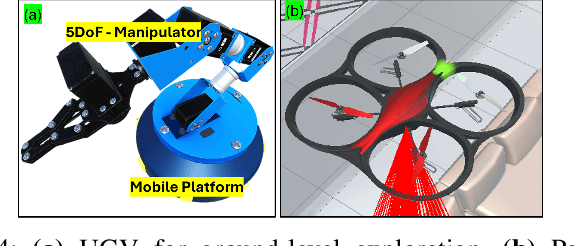
This paper presents a novel approach to multi-robot planning and collaboration. We demonstrate a cognitive strategy for robots in human-robot teams that incorporates metacognition, natural language communication, and explainability. The system is embodied using the HARMONIC architecture that flexibly integrates cognitive and control capabilities across the team. We evaluate our approach through simulation experiments involving a joint search task by a team of heterogeneous robots (a UGV and a drone) and a human. We detail the system's handling of complex, real-world scenarios, effective action coordination between robots with different capabilities, and natural human-robot communication. This work demonstrates that the robots' ability to reason about plans, goals, and attitudes, and to provide explanations for actions and decisions are essential prerequisites for realistic human-robot teaming.
HARMONIC: A Framework for Explanatory Cognitive Robots
Sep 26, 2024We present HARMONIC, a framework for implementing cognitive robots that transforms general-purpose robots into trusted teammates capable of complex decision-making, natural communication and human-level explanation. The framework supports interoperability between a strategic (cognitive) layer for high-level decision-making and a tactical (robot) layer for low-level control and execution. We describe the core features of the framework and our initial implementation, in which HARMONIC was deployed on a simulated UGV and drone involved in a multi-robot search and retrieval task.