 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn All Deep System for Badminton Game Analysis
Aug 24, 2023The CoachAI Badminton 2023 Track1 initiative aim to automatically detect events within badminton match videos. Detecting small objects, especially the shuttlecock, is of quite importance and demands high precision within the challenge. Such detection is crucial for tasks like hit count, hitting time, and hitting location. However, even after revising the well-regarded shuttlecock detecting model, TrackNet, our object detection models still fall short of the desired accuracy. To address this issue, we've implemented various deep learning methods to tackle the problems arising from noisy detectied data, leveraging diverse data types to improve precision. In this report, we detail the detection model modifications we've made and our approach to the 11 tasks. Notably, our system garnered a score of 0.78 out of 1.0 in the challenge.
Fine-grained Visual Classification with High-temperature Refinement and Background Suppression
Mar 11, 2023Fine-grained visual classification is a challenging task due to the high similarity between categories and distinct differences among data within one single category. To address the challenges, previous strategies have focused on localizing subtle discrepancies between categories and enhencing the discriminative features in them. However, the background also provides important information that can tell the model which features are unnecessary or even harmful for classification, and models that rely too heavily on subtle features may overlook global features and contextual information. In this paper, we propose a novel network called ``High-temperaturE Refinement and Background Suppression'' (HERBS), which consists of two modules, namely, the high-temperature refinement module and the background suppression module, for extracting discriminative features and suppressing background noise, respectively. The high-temperature refinement module allows the model to learn the appropriate feature scales by refining the features map at different scales and improving the learning of diverse features. And, the background suppression module first splits the features map into foreground and background using classification confidence scores and suppresses feature values in low-confidence areas while enhancing discriminative features. The experimental results show that the proposed HERBS effectively fuses features of varying scales, suppresses background noise, discriminative features at appropriate scales for fine-grained visual classification.The proposed method achieves state-of-the-art performance on the CUB-200-2011 and NABirds benchmarks, surpassing 93% accuracy on both datasets. Thus, HERBS presents a promising solution for improving the performance of fine-grained visual classification tasks. code will be available: soon
A Novel Plug-in Module for Fine-Grained Visual Classification
Feb 08, 2022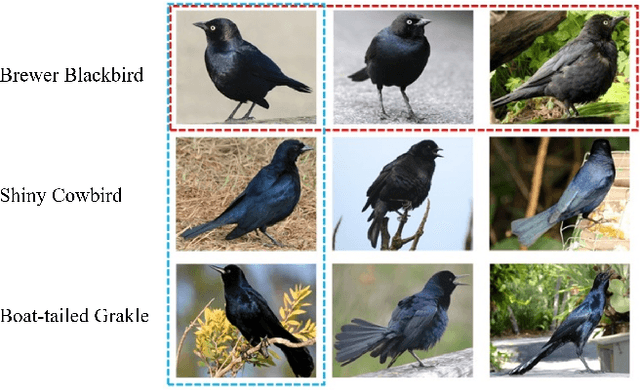


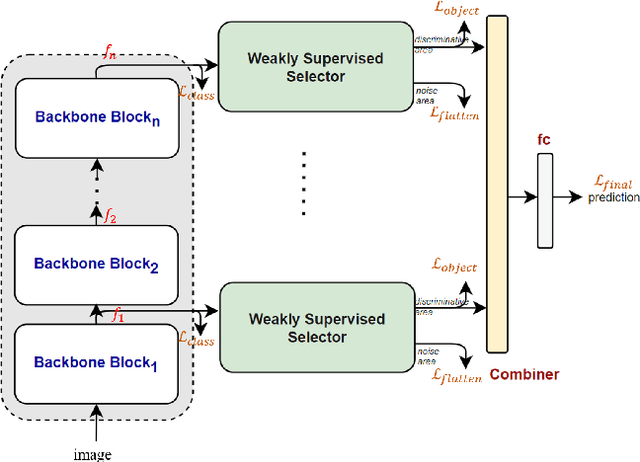
Visual classification can be divided into coarse-grained and fine-grained classification. Coarse-grained classification represents categories with a large degree of dissimilarity, such as the classification of cats and dogs, while fine-grained classification represents classifications with a large degree of similarity, such as cat species, bird species, and the makes or models of vehicles. Unlike coarse-grained visual classification, fine-grained visual classification often requires professional experts to label data, which makes data more expensive. To meet this challenge, many approaches propose to automatically find the most discriminative regions and use local features to provide more precise features. These approaches only require image-level annotations, thereby reducing the cost of annotation. However, most of these methods require two- or multi-stage architectures and cannot be trained end-to-end. Therefore, we propose a novel plug-in module that can be integrated to many common backbones, including CNN-based or Transformer-based networks to provide strongly discriminative regions. The plugin module can output pixel-level feature maps and fuse filtered features to enhance fine-grained visual classification. Experimental results show that the proposed plugin module outperforms state-of-the-art approaches and significantly improves the accuracy to 92.77\% and 92.83\% on CUB200-2011 and NABirds, respectively. We have released our source code in Github https://github.com/chou141253/FGVC-PIM.git.