 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeleoperated aerial manipulator and its avatar. Part 1: Communication, system's interconnection, control, and virtual world
Oct 19, 2020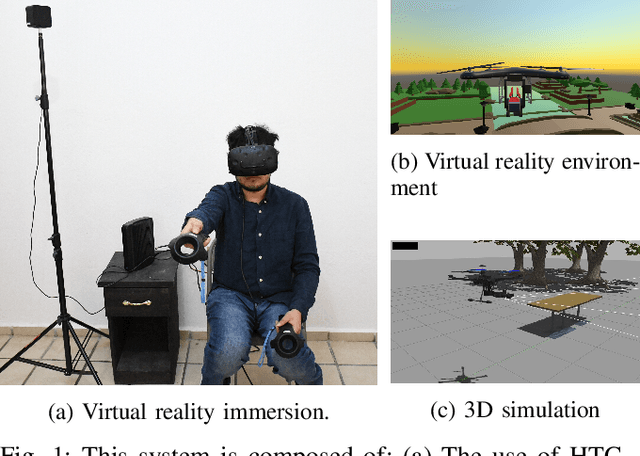
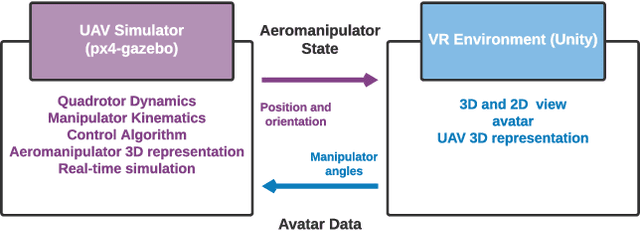
The tasks that an aerial manipulator can perform are incredibly diverse. However, nowadays the technology is not completely developed to achieve complex tasks autonomously. That's why we propose a human-in-the-loop system that can control a semi-autonomous aerial manipulator to accomplish these kinds of tasks. Furthermore, motivated by the growing trend of virtual reality systems, together with teleoperation, we develop a system composed of: an aerial manipulator model programmed in PX4 and modeled in Gazebo, a virtual reality immersion with an interactive controller, and the interconnection between the aforementioned systems via the Internet. This research is the first part of a broader project. In this part, we present experiments in the software in the loop simulation. The code of this work is liberated on our GitHub page. Also, a video shows the conducted experiments.
Non-Stationary Stochastic Global Optimization Algorithms
Oct 11, 2020Gomez proposes a formal and systematic approach for characterizing stochastic global optimization algorithms. Using it, Gomez formalizes algorithms with a fixed next-population stochastic method, i.e., algorithms defined as stationary Markov processes. These are the cases of standard versions of hill-climbing, parallel hill-climbing, generational genetic, steady-state genetic, and differential evolution algorithms. This paper continues such a systematic formal approach. First, we generalize the sufficient conditions convergence lemma from stationary to non-stationary Markov processes. Second, we develop Markov kernels for some selection schemes. Finally, we formalize both simulated-annealing and evolutionary-strategies using the systematic formal approach.