 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving genetic algorithms performance via deterministic population shrinkage
Jan 22, 2024Despite the intuition that the same population size is not needed throughout the run of an Evolutionary Algorithm (EA), most EAs use a fixed population size. This paper presents an empirical study on the possible benefits of a Simple Variable Population Sizing (SVPS) scheme on the performance of Genetic Algorithms (GAs). It consists in decreasing the population for a GA run following a predetermined schedule, configured by a speed and a severity parameter. The method uses as initial population size an estimation of the minimum size needed to supply enough building blocks, using a fixed-size selectorecombinative GA converging within some confidence interval toward good solutions for a particular problem. Following this methodology, a scalability analysis is conducted on deceptive, quasi-deceptive, and non-deceptive trap functions in order to assess whether SVPS-GA improves performances compared to a fixed-size GA under different problem instances and difficulty levels. Results show several combinations of speed-severity where SVPS-GA preserves the solution quality while improving performances, by reducing the number of evaluations needed for success.
Self-Regulated Artificial Ant Colonies on Digital Image Habitats
Dec 01, 2005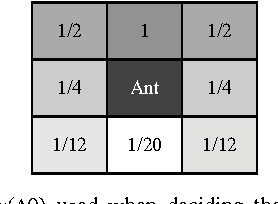
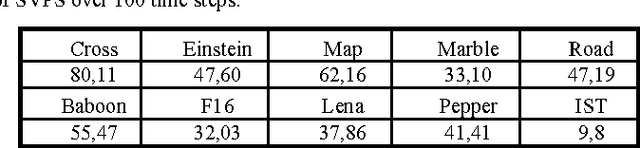
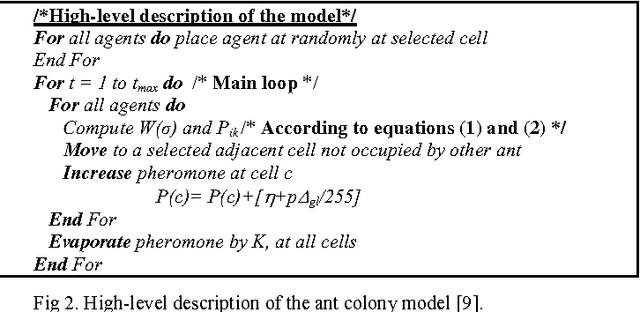
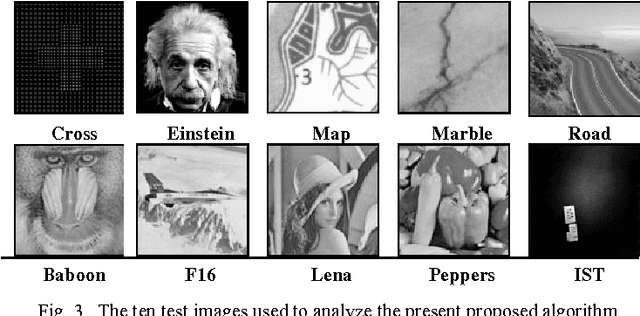
Artificial life models, swarm intelligent and evolutionary computation algorithms are usually built on fixed size populations. Some studies indicate however that varying the population size can increase the adaptability of these systems and their capability to react to changing environments. In this paper we present an extended model of an artificial ant colony system designed to evolve on digital image habitats. We will show that the present swarm can adapt the size of the population according to the type of image on which it is evolving and reacting faster to changing images, thus converging more rapidly to the new desired regions, regulating the number of his image foraging agents. Finally, we will show evidences that the model can be associated with the Mathematical Morphology Watershed algorithm to improve the segmentation of digital grey-scale images. KEYWORDS: Swarm Intelligence, Perception and Image Processing, Pattern Recognition, Mathematical Morphology, Social Cognitive Maps, Social Foraging, Self-Organization, Distributed Search.
* 8 pages, 17 figures, full pictures in http://alfa.ist.utl.pt/~cvrm/staff/vramos/Vramos-WCLC05b.pdf
Societal Implicit Memory and his Speed on Tracking Extrema over Dynamic Environments using Self-Regulatory Swarms
Dec 01, 2005
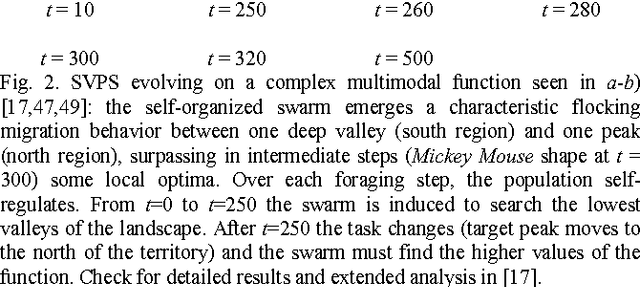
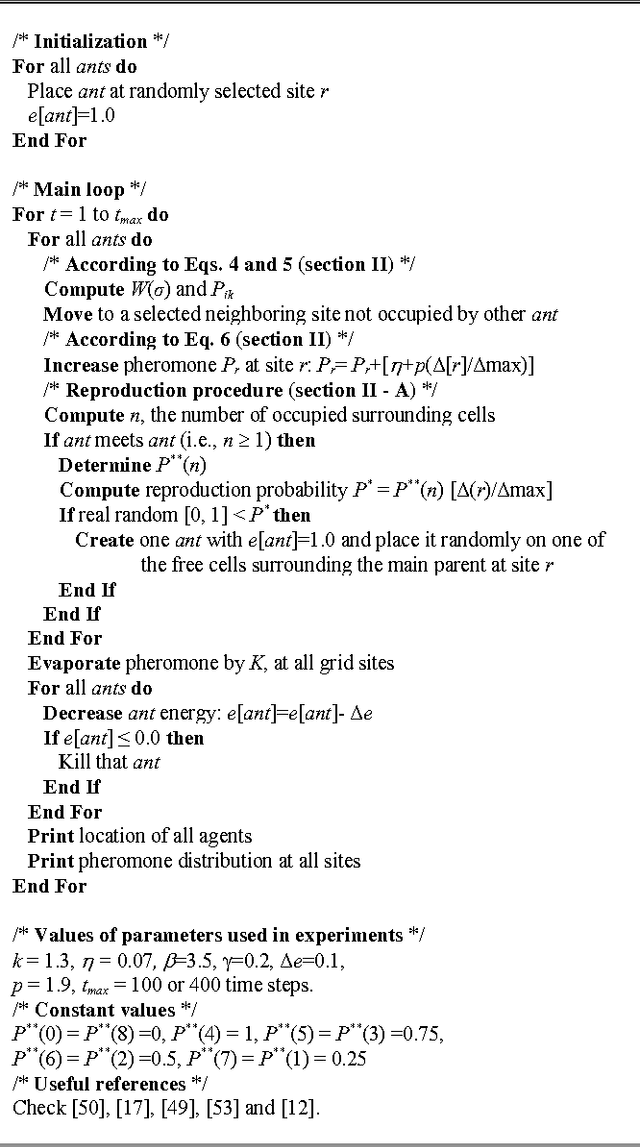

In order to overcome difficult dynamic optimization and environment extrema tracking problems, We propose a Self-Regulated Swarm (SRS) algorithm which hybridizes the advantageous characteristics of Swarm Intelligence as the emergence of a societal environmental memory or cognitive map via collective pheromone laying in the landscape (properly balancing the exploration/exploitation nature of our dynamic search strategy), with a simple Evolutionary mechanism that trough a direct reproduction procedure linked to local environmental features is able to self-regulate the above exploratory swarm population, speeding it up globally. In order to test his adaptive response and robustness, we have recurred to different dynamic multimodal complex functions as well as to Dynamic Optimization Control problems, measuring reaction speeds and performance. Final comparisons were made with standard Genetic Algorithms (GAs), Bacterial Foraging strategies (BFOA), as well as with recent Co-Evolutionary approaches. SRS's were able to demonstrate quick adaptive responses, while outperforming the results obtained by the other approaches. Additionally, some successful behaviors were found. One of the most interesting illustrate that the present SRS collective swarm of bio-inspired ant-like agents is able to track about 65% of moving peaks traveling up to ten times faster than the velocity of a single individual composing that precise swarm tracking system.
On Self-Regulated Swarms, Societal Memory, Speed and Dynamics
Dec 01, 2005
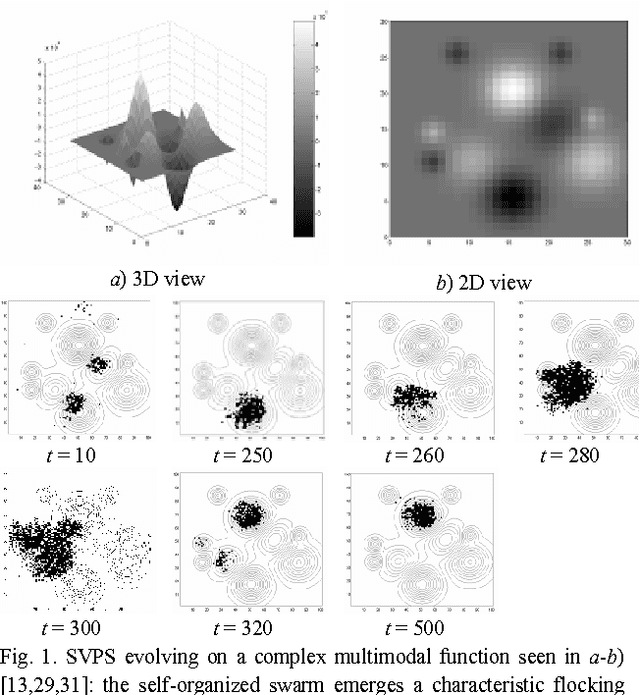

We propose a Self-Regulated Swarm (SRS) algorithm which hybridizes the advantageous characteristics of Swarm Intelligence as the emergence of a societal environmental memory or cognitive map via collective pheromone laying in the landscape (properly balancing the exploration/exploitation nature of our dynamic search strategy), with a simple Evolutionary mechanism that trough a direct reproduction procedure linked to local environmental features is able to self-regulate the above exploratory swarm population, speeding it up globally. In order to test his adaptive response and robustness, we have recurred to different dynamic multimodal complex functions as well as to Dynamic Optimization Control problems, measuring reaction speeds and performance. Final comparisons were made with standard Genetic Algorithms (GAs), Bacterial Foraging strategies (BFOA), as well as with recent Co-Evolutionary approaches. SRS's were able to demonstrate quick adaptive responses, while outperforming the results obtained by the other approaches. Additionally, some successful behaviors were found. One of the most interesting illustrate that the present SRS collective swarm of bio-inspired ant-like agents is able to track about 65% of moving peaks traveling up to ten times faster than the velocity of a single individual composing that precise swarm tracking system.