 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Networked Swarm Model for UAV Deployment in the Assessment of Forest Environments
Jul 15, 2016

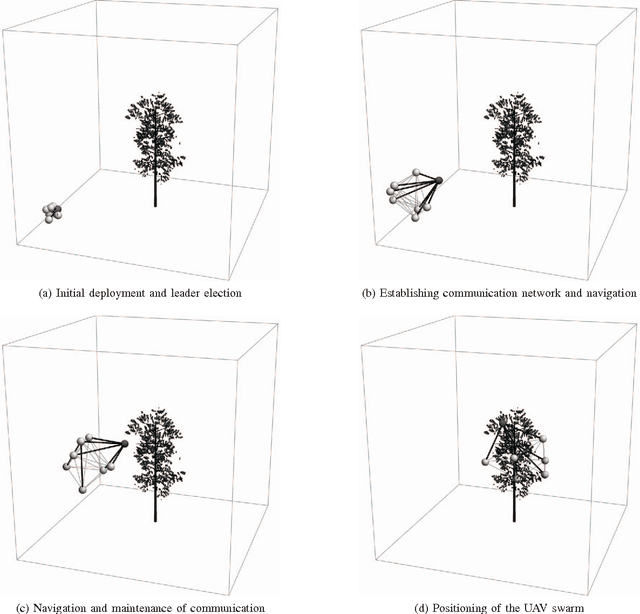
Autonomous Unmanned Aerial Vehicles (UAVs) have gained popularity due to their many potential application fields. Alongside sophisticated sensors, UAVs can be equipped with communication adaptors aimed for inter-UAV communication. Inter-communication of UAVs to form a UAV swarm raises questions on how to manage its communication structure and mobility. In this paper, we consider therefore the problem of establishing an efficient swarm movement model and a network topology between a collection of UAVs, which are specifically deployed for the scenario of high-quality forest-mapping. The forest environment with its highly heterogeneous distribution of trees and obstacles represents an extreme challenge for a UAV swarm. It requires the swarm to constantly avoid possible collisions with trees, to change autonomously the trajectory, which can lead to disconnection to the swarm, and to reconnect to the swarm after passing the obstacle, while continue collecting environmental data that needs to be fused and assessed efficiently. In this paper, we propose a novel solution to the formation flight problem for UAV swarms. The proposed method provides an adaptive and reliable network structure, which maintains swarm connectivity and communicability. These characteristics are needed to achieve a detailed and accurate description of the environment from the data acquired by the UAV swarm. The main characteristics of our approach are high scalability regarding the number of UAVs in the swarm and the adaptive network topology within the swarm.