 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMachine Learning Approaches for Non-Intrusive Home Absence Detection Based on Appliance Electrical Use
Mar 30, 2022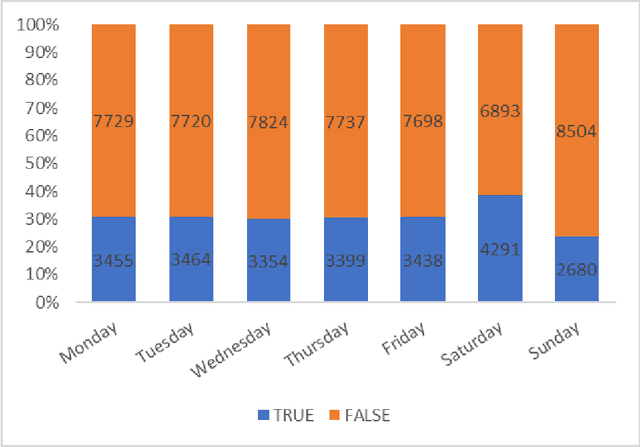

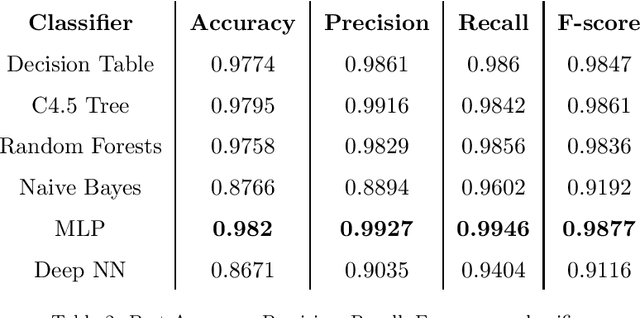

Home absence detection is an emerging field on smart home installations. Identifying whether or not the residents of the house are present, is important in numerous scenarios. Possible scenarios include but are not limited to: elderly people living alone, people suffering from dementia, home quarantine. The majority of published papers focus on either pressure / door sensors or cameras in order to detect outing events. Although the aforementioned approaches provide solid results, they are intrusive and require modifications for sensor placement. In our work, appliance electrical use is investigated as a means for detecting the presence or absence of residents. The energy use is the result of power disaggregation, a non intrusive / non invasive sensing method. Since a dataset providing energy data and ground truth for home absence is not available, artificial outing events were introduced on the UK-DALE dataset, a well known dataset for Non Intrusive Load Monitoring (NILM). Several machine learning algorithms were evaluated using the generated dataset. Benchmark results have shown that home absence detection using appliance power consumption is feasible.
From Robot Self-Localization to Global-Localization: An RSSI Based Approach
Dec 20, 2021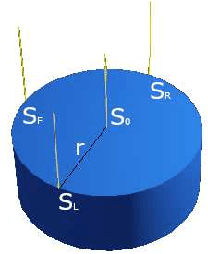
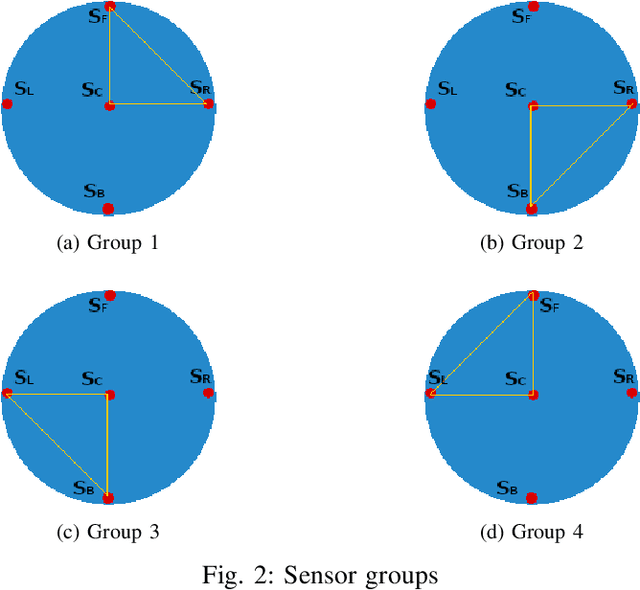
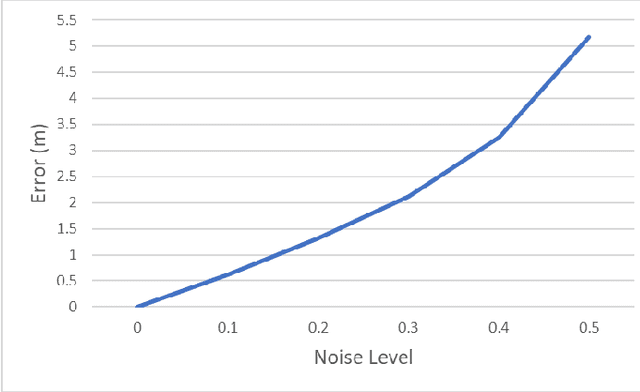
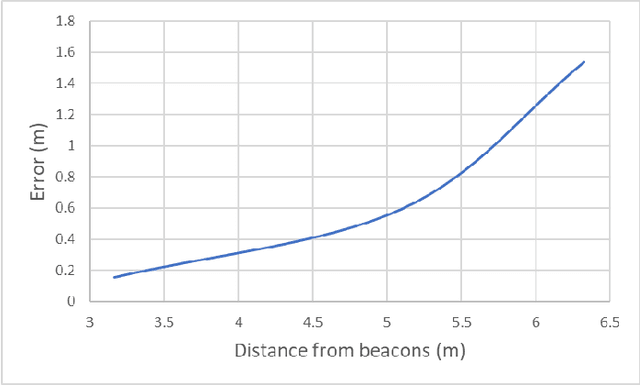
Localization is a crucial task for autonomous mobile robots in order to successfully move to goal locations in their environment. Usually this is done in a robot-centric manner, where the robot maintains a map with its body in the center. In swarm robotics applications, where a group of robots need to coordinate in order to achieve their common goals, robot-centric localization will not suffice as each member of the swarm has its own frame of reference. One way to deal with this problem is to create, maintain and share a common map (global coordinate system), among the members of the swarm. This paper presents an approach to global localization for a group of robots in unknown, GPS and landmark free environments that extends the localization scheme of the LadyBug algorithm. The main idea relies on members of the swarm stay still and act as beacons, emitting electromagnetic signals. These stationary robots form a global frame of reference and the rest of the group localize themselves in it using the received signal strength indicator (RSSI). The proposed method is evaluated, and the results obtained from the experiments are promising.