 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLightweight Multi-Drone Detection and 3D-Localization via YOLO
Feb 18, 2022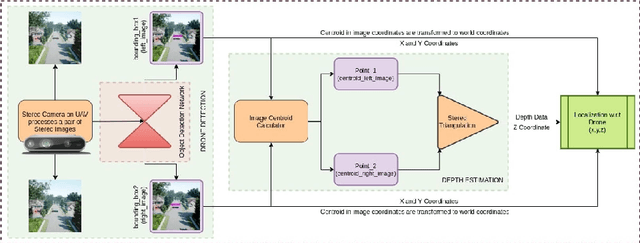
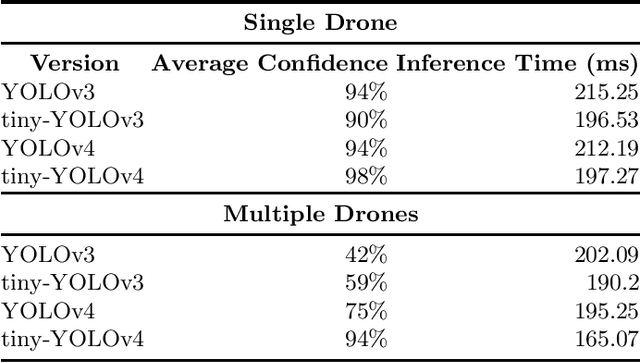
In this work, we present and evaluate a method to perform real-time multiple drone detection and three-dimensional localization using state-of-the-art tiny-YOLOv4 object detection algorithm and stereo triangulation. Our computer vision approach eliminates the need for computationally expensive stereo matching algorithms, thereby significantly reducing the memory footprint and making it deployable on embedded systems. Our drone detection system is highly modular (with support for various detection algorithms) and capable of identifying multiple drones in a system, with real-time detection accuracy of up to 77\% with an average FPS of 332 (on Nvidia Titan Xp). We also test the complete pipeline in AirSim environment, detecting drones at a maximum distance of 8 meters, with a mean error of $23\%$ of the distance. We also release the source code for the project, with pre-trained models and the curated synthetic stereo dataset.