 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomain Adaptation in Robot Fault Diagnostic Systems
Mar 04, 2019
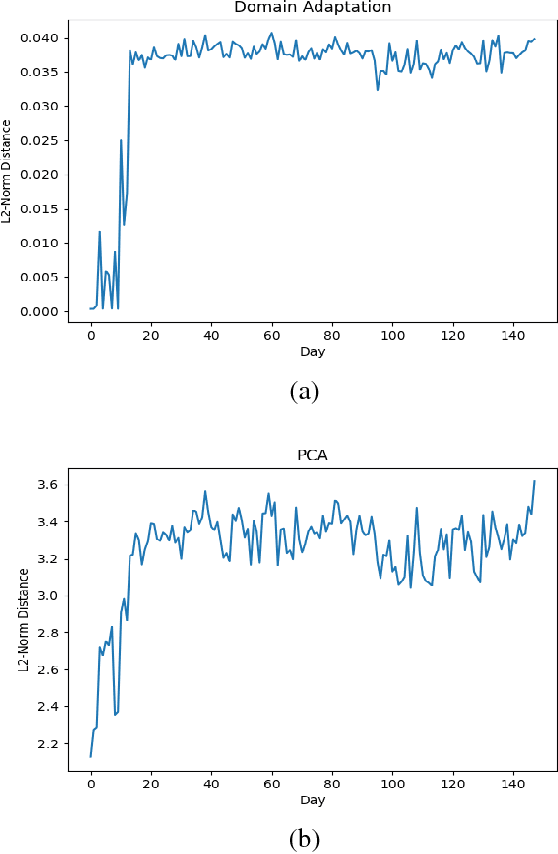
Industrial robots play an important role in manufacturing process. Since robots are usually set up in parallel-serial settings, breakdown of a single robot has a negative effect on the entire manufacturing process in that it slows down the process. Therefore, fault diagnostic systems based on the internal signals of robots have gained a lot of attention as essential components of the services provided for industrial robots. The current work in fault diagnostic algorithms extract features from the internal signals of the robot while the robot is healthy in order to build a model representing the normal robot behavior. During the test, the extracted features are compared to the normal behavior for detecting any deviation. The main challenge with the existing fault diagnostic algorithms is that when the task of the robot changes, the extracted features differ from those of the normal behavior. As a result, the algorithm raises false alarm. To eliminate the false alarm, fault diagnostic algorithms require the model to be retrained with normal data of the new task. In this paper, domain adaptation, {\it a.k.a} transfer learning, is used to transfer the knowledge of the trained model from one task to another in order to prevent the need for retraining and to eliminate the false alarm. The results of the proposed algorithm on real dataset show the ability of the domain adaptation in distinguishing the operation change from the mechanical condition change.
Identification of Dynamic functional brain network states Through Tensor Decomposition
Oct 02, 2014
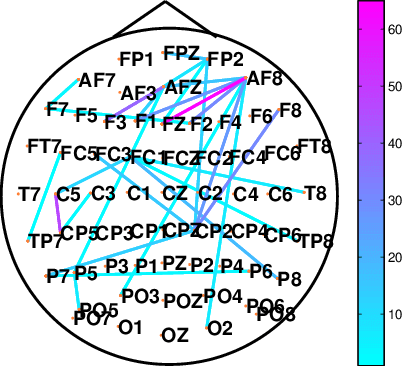
With the advances in high resolution neuroimaging, there has been a growing interest in the detection of functional brain connectivity. Complex network theory has been proposed as an attractive mathematical representation of functional brain networks. However, most of the current studies of functional brain networks have focused on the computation of graph theoretic indices for static networks, i.e. long-time averages of connectivity networks. It is well-known that functional connectivity is a dynamic process and the construction and reorganization of the networks is key to understanding human cognition. Therefore, there is a growing need to track dynamic functional brain networks and identify time intervals over which the network is quasi-stationary. In this paper, we present a tensor decomposition based method to identify temporally invariant 'network states' and find a common topographic representation for each state. The proposed methods are applied to electroencephalogram (EEG) data during the study of error-related negativity (ERN).