 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Frequency Bispectral EEG Analysis of Reach-to-Grasp Planning and Execution
Feb 03, 2026Neural control of grasping arises from nonlinear interactions across multiple brain rhythms, yet EEG-based motor decoding has largely relied on linear, second-order spectral features. Here, we examine whether higher-order cross-frequency dynamics distinguish motor planning from execution during natural reach-to-grasp behavior. EEG was recorded in a cue-based paradigm during executed precision and power grips, enabling stage-resolved analysis of preparatory and execution-related neural activity. Cross-frequency bispectral analysis was used to compute bicoherence matrices across canonical frequency band pairs, from which magnitude- and phase-based features were extracted. Classification, permutation-based feature selection, and within-subject statistical testing showed that execution is characterized by substantially stronger and more discriminative nonlinear coupling than planning, with dominant contributions from beta- and gamma-driven interactions. In contrast, decoding of precision versus power grips achieved comparable performance during planning and execution, indicating that grasp-type representations emerge during planning and persist into execution. Spatial and spectral analyses further revealed that informative bispectral features reflect coordinated activity across prefrontal, central, and occipital regions. Despite substantial feature redundancy, effective dimensionality reduction preserved decoding performance. Together, these findings demonstrate that nonlinear cross-frequency coupling provides an interpretable and robust marker of motor planning and execution, extending bispectral EEG analysis to ecologically valid grasping and supporting its relevance for brain-computer interfaces and neuroprosthetic control.
End-to-end Optimization of Belief and Policy Learning in Shared Autonomy Paradigms
Jan 30, 2026Shared autonomy systems require principled methods for inferring user intent and determining appropriate assistance levels. This is a central challenge in human-robot interaction, where systems must be successful while being mindful of user agency. Previous approaches relied on static blending ratios or separated goal inference from assistance arbitration, leading to suboptimal performance in unstructured environments. We introduce BRACE (Bayesian Reinforcement Assistance with Context Encoding), a novel framework that fine-tunes Bayesian intent inference and context-adaptive assistance through an architecture enabling end-to-end gradient flow between intent inference and assistance arbitration. Our pipeline conditions collaborative control policies on environmental context and complete goal probability distributions. We provide analysis showing (1) optimal assistance levels should decrease with goal uncertainty and increase with environmental constraint severity, and (2) integrating belief information into policy learning yields a quadratic expected regret advantage over sequential approaches. We validated our algorithm against SOTA methods (IDA, DQN) using a three-part evaluation progressively isolating distinct challenges of end-effector control: (1) core human-interaction dynamics in a 2D human-in-the-loop cursor task, (2) non-linear dynamics of a robotic arm, and (3) integrated manipulation under goal ambiguity and environmental constraints. We demonstrate improvements over SOTA, achieving 6.3% higher success rates and 41% increased path efficiency, and 36.3% success rate and 87% path efficiency improvement over unassisted control. Our results confirmed that integrated optimization is most beneficial in complex, goal-ambiguous scenarios, and is generalizable across robotic domains requiring goal-directed assistance, advancing the SOTA for adaptive shared autonomy.
Macroscopic EEG Reveals Discriminative Low-Frequency Oscillations in Plan-to-Grasp Visuomotor Tasks
Oct 21, 2025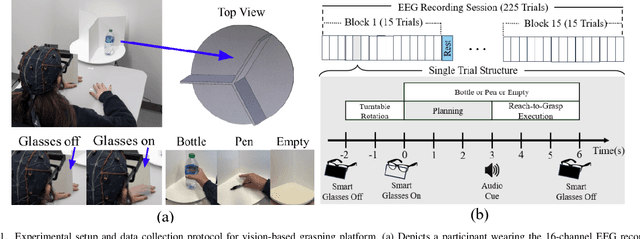


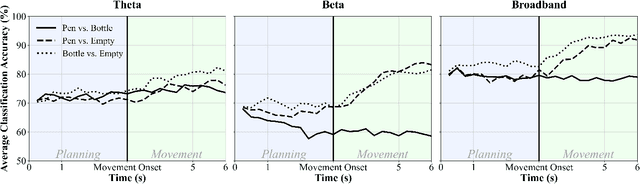
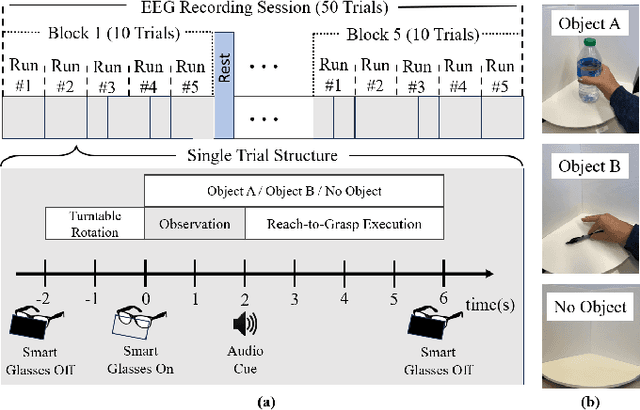
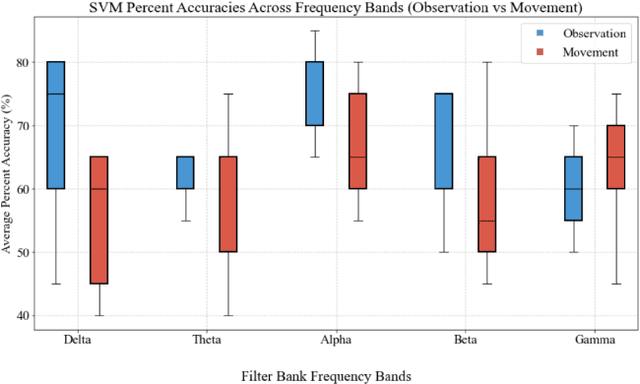
The vision-based grasping brain network integrates visual perception with cognitive and motor processes for visuomotor tasks. While invasive recordings have successfully decoded localized neural activity related to grasp type planning and execution, macroscopic neural activation patterns captured by noninvasive electroencephalography (EEG) remain far less understood. We introduce a novel vision-based grasping platform to investigate grasp-type-specific (precision, power, no-grasp) neural activity across large-scale brain networks using EEG neuroimaging. The platform isolates grasp-specific planning from its associated execution phases in naturalistic visuomotor tasks, where the Filter-Bank Common Spatial Pattern (FBCSP) technique was designed to extract discriminative frequency-specific features within each phase. Support vector machine (SVM) classification discriminated binary (precision vs. power, grasp vs. no-grasp) and multiclass (precision vs. power vs. no-grasp) scenarios for each phase, and were compared against traditional Movement-Related Cortical Potential (MRCP) methods. Low-frequency oscillations (0.5-8 Hz) carry grasp-related information established during planning and maintained throughout execution, with consistent classification performance across both phases (75.3-77.8\%) for precision vs. power discrimination, compared to 61.1\% using MRCP. Higher-frequency activity (12-40 Hz) showed phase-dependent results with 93.3\% accuracy for grasp vs. no-grasp classification but 61.2\% for precision vs. power discrimination. Feature importance using SVM coefficients identified discriminative features within frontoparietal networks during planning and motor networks during execution. This work demonstrated the role of low-frequency oscillations in decoding grasp type during planning using noninvasive EEG.
Toward human-centered shared autonomy AI paradigms for human-robot teaming in healthcare
Jul 24, 2024With recent advancements in AI and computation tools, intelligent paradigms emerged to empower different fields such as healthcare robots with new capabilities. Advanced AI robotic algorithms (e.g., reinforcement learning) can be trained and developed to autonomously make individual decisions to achieve a desired and usually fixed goal. However, such independent decisions and goal achievements might not be ideal for a healthcare robot that usually interacts with a dynamic end-user or a patient. In such a complex human-robot interaction (teaming) framework, the dynamic user continuously wants to be involved in decision-making as well as introducing new goals while interacting with their present environment in real-time. To address this challenge, an adaptive shared autonomy AI paradigm is required to be developed for the two interactive agents (Human & AI agents) with a foundation based on human-centered factors to avoid any possible ethical issues and guarantee no harm to humanity.
Classification of Emerging Neural Activity from Planning to Grasp Execution using a Novel EEG-Based BCI Platform
Feb 05, 2024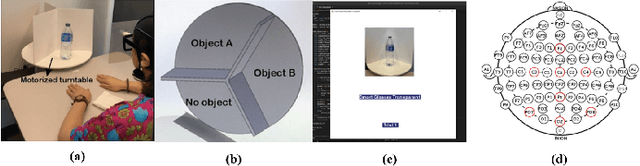
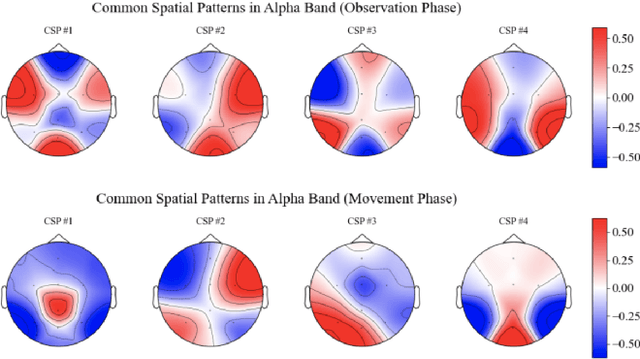
There have been different reports of developing Brain-Computer Interface (BCI) platforms to investigate the noninvasive electroencephalography (EEG) signals associated with plan-to-grasp tasks in humans. However, these reports were unable to clearly show evidence of emerging neural activity from the planning (observation) phase - dominated by the vision cortices - to grasp execution - dominated by the motor cortices. In this study, we developed a novel vision-based grasping BCI platform that distinguishes different grip types (power and precision) through the phases of plan-to-grasp tasks using EEG signals. Using our platform and extracting features from Filter Bank Common Spatial Patterns (FBCSP), we show that frequency-band specific EEG contains discriminative spatial patterns present in both the observation and movement phases. Support Vector Machine (SVM) classification (power vs precision) yielded high accuracy percentages of 74% and 68% for the observation and movement phases in the alpha band, respectively.
Bispectrum Analysis of Noninvasive EEG Signals Discriminates Complex and Natural Grasp Types
Feb 01, 2024


The bispectrum stands out as a revolutionary tool in frequency domain analysis, leaping the usual power spectrum by capturing crucial phase information between frequency components. In our innovative study, we have utilized the bispectrum to analyze and decode complex grasping movements, gathering EEG data from five human subjects. We put this data through its paces with three classifiers, focusing on both magnitude and phase-related features. The results highlight the bispectrum's incredible ability to delve into neural activity and differentiate between various grasping motions with the Support Vector Machine (SVM) classifier emerging as a standout performer. In binary classification, it achieved a remarkable 97\% accuracy in identifying power grasp, and in the more complex multiclass tasks, it maintained an impressive 94.93\% accuracy. This finding not only underscores the bispectrum's analytical strength but also showcases the SVM's exceptional capability in classification, opening new doors in our understanding of movement and neural dynamics.