 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterization and Mitigation of Insufficiencies in Automated Driving Systems
Apr 15, 2024Automated Driving (AD) systems have the potential to increase safety, comfort and energy efficiency. Recently, major automotive companies have started testing and validating AD systems (ADS) on public roads. Nevertheless, the commercial deployment and wide adoption of ADS have been moderate, partially due to system functional insufficiencies (FI) that undermine passenger safety and lead to hazardous situations on the road. FIs are defined in ISO 21448 Safety Of The Intended Functionality (SOTIF). FIs are insufficiencies in sensors, actuators and algorithm implementations, including neural networks and probabilistic calculations. Examples of FIs in ADS include inaccurate ego-vehicle localization on the road, incorrect prediction of a cyclist maneuver, unreliable detection of a pedestrian, etc. The main goal of our study is to formulate a generic architectural design pattern, which is compatible with existing methods and ADS, to improve FI mitigation and enable faster commercial deployment of ADS. First, we studied the 2021 autonomous vehicles disengagement reports published by the California Department of Motor Vehicles (DMV). The data clearly show that disengagements are five times more often caused by FIs rather than by system faults. We then made a comprehensive list of insufficiencies and their characteristics by analyzing over 10 hours of publicly available road test videos. In particular, we identified insufficiency types in four major categories: world model, motion plan, traffic rule, and operational design domain. The insufficiency characterization helps making the SOTIF analyses of triggering conditions more systematic and comprehensive. Based on our FI characterization, simulation experiments and literature survey, we define a novel generic architectural design pattern Daruma to dynamically select the channel that is least likely to have a FI at the moment.
A Formally Verified Fail-Operational Safety Concept for Automated Driving
Nov 11, 2020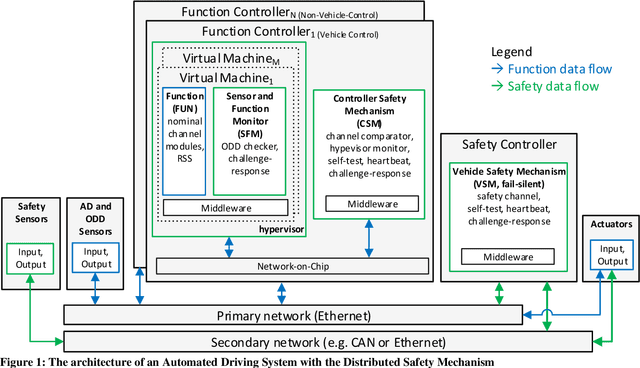
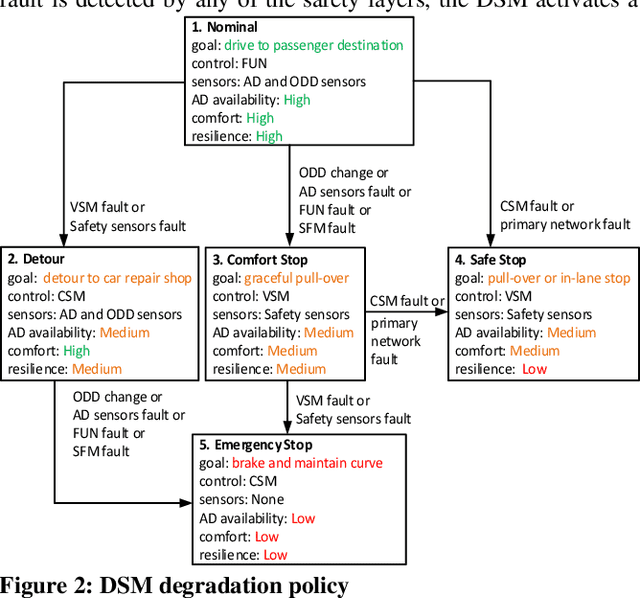
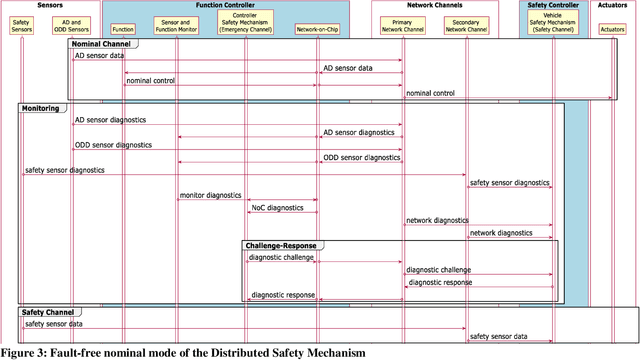
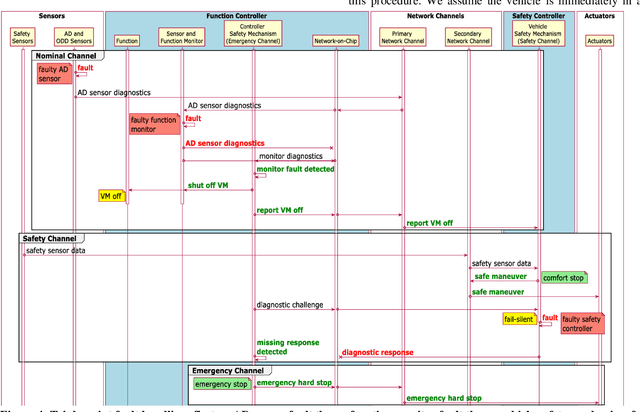
Modern Automated Driving (AD) systems rely on safety measures to handle faults and to bring vehicle to a safe state. To eradicate lethal road accidents, car manufacturers are constantly introducing new perception as well as control systems. Contemporary automotive design and safety engineering best practices are suitable for analyzing system components in isolation, whereas today's highly complex and interdependent AD systems require novel approach to ensure resilience to multi-point failures. We present a holistic safety concept unifying advanced safety measures for handling multiple-point faults. Our proposed approach enables designers to focus on more pressing issues such as handling fault-free hazardous behavior associated with system performance limitations. To verify our approach, we developed an executable model of the safety concept in the formal specification language mCRL2. The model behavior is governed by a four-mode degradation policy controlling distributed processors, redundant communication networks, and virtual machines. To keep the vehicle as safe as possible our degradation policy can reduce driving comfort or AD system's availability using additional low-cost driving channels. We formalized five safety requirements in the modal mu-calculus and proved them against our mCRL2 model, which is intractable to accomplish exhaustively using traditional road tests or simulation techniques. In conclusion, our formally proven safety concept defines a holistic design pattern for designing AD systems.