 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Ballad of the Bots: Sonification Using Cognitive Metaphor to Support Immersed Teleoperation of Robot Teams
Jul 12, 2024

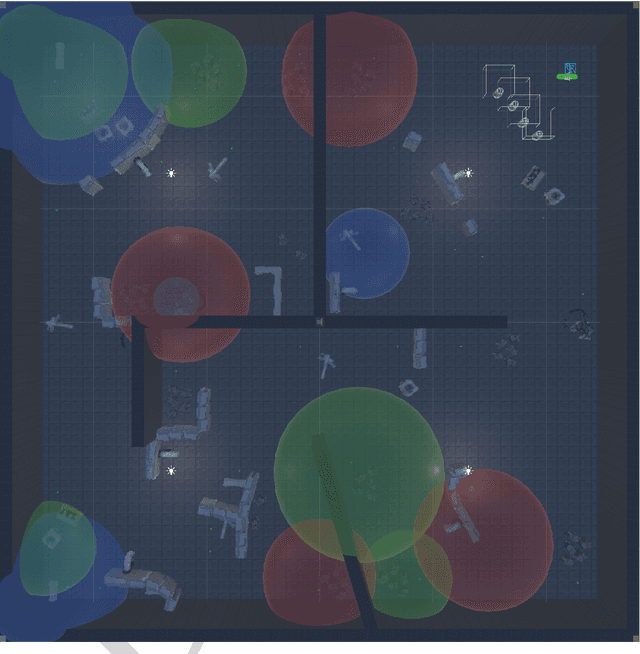
As an embodied and spatial medium, virtual reality is proving an attractive proposition for robot teleoperation in hazardous environments. This paper examines a nuclear decommissioning scenario in which a simulated team of semi-autonomous robots are used to characterise a chamber within a virtual nuclear facility. This study examines the potential utility and impact of sonification as a means of communicating salient operator data in such an environment. However, the question of what sound should be used and how it can be applied in different applications is far from resolved. This paper explores and compares two sonification design approaches. The first is inspired by the theory of cognitive metaphor to create sonifications that align with socially acquired contextual and ecological understanding of the application domain. The second adopts a computationalist approach using auditory mappings that are commonplace in the literature. The results suggest that the computationalist approach outperforms the cognitive metaphor approach in terms of predictability and mental workload. However, qualitative data analysis demonstrates that the cognitive metaphor approach resulted in sounds that were more intuitive, and were better implemented for spatialisation of data sources and data legibility when there was more than one sound source.