 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous search for a diffusive source in an unknown environment
Jun 07, 2013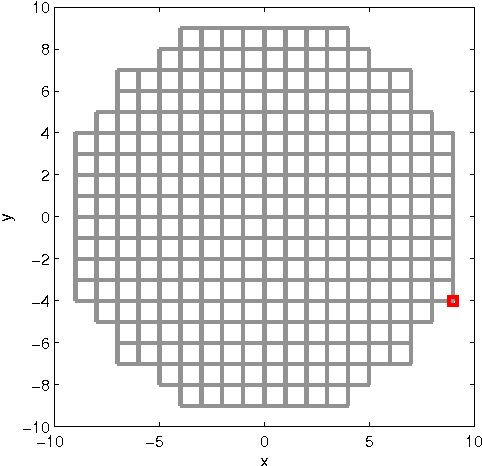
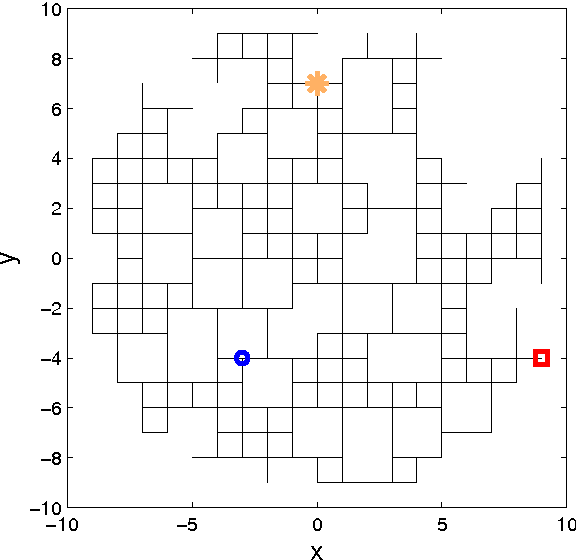
The paper presents an approach to olfactory search for a diffusive emitting source of tracer (e.g. aerosol, gas) in an environment with unknown map of randomly placed and shaped obstacles. The measurements of tracer concentration are sporadic, noisy and without directional information. The search domain is discretised and modelled by a finite two-dimensional lattice. The links is the lattice represent the traversable paths for emitted particles and for the searcher. A missing link in the lattice indicates a blocked paths, due to the walls or obstacles. The searcher must simultaneously estimate the source parameters, the map of the search domain and its own location within the map. The solution is formulated in the sequential Bayesian framework and implemented as a Rao-Blackwellised particle filter with information-driven motion control. The numerical results demonstrate the concept and its performance.