Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransition control of a tail-sitter UAV using recurrent neural networks
Jun 29, 2020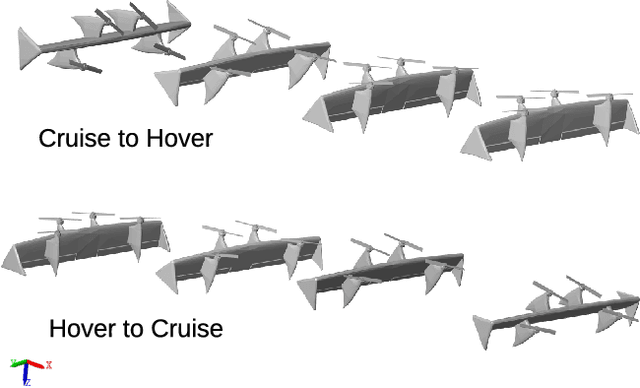
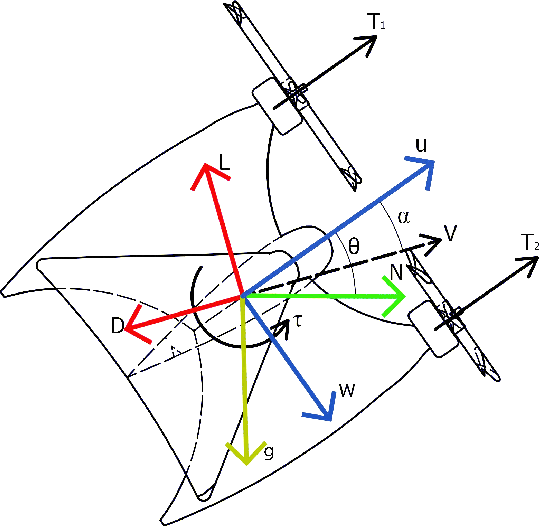
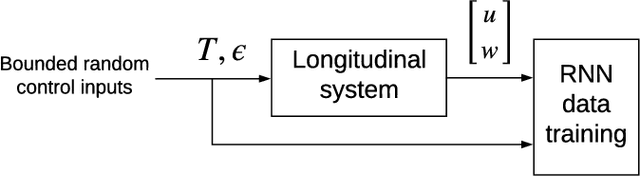

This paper presents the implementation of a Recurrent Neural Network (RNN) based-controller for the stabilization of the flight transition maneuver (hover-cruise and vice versa) of a tail-sitter UAV. The control strategy is based on attitude and velocity stabilization. For that aim, the RNN is used for the estimation of high nonlinear aerodynamic terms during the transition stage. Then, this estimate is used together with a feedback linearization technique for stabilizing the entire system. Results show convergence of linear velocities and the pitch angle during the transition maneuver. To analyze the performance of our proposed control strategy, we present simulations for the transition from hover to cruise and vice versa.
* 7 pages 16 figures Conference paper
Via