 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlgebraic and Geometric Models for Space Networking
Apr 03, 2023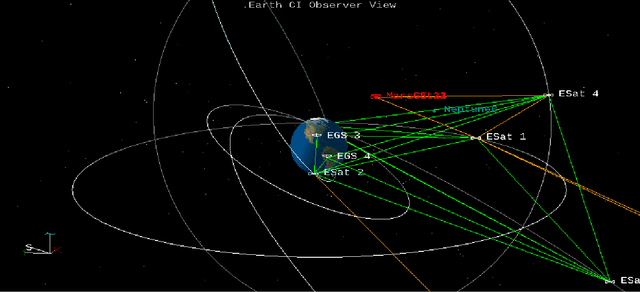



In this paper we introduce some new algebraic and geometric perspectives on networked space communications. Our main contribution is a novel definition of a time-varying graph (TVG), defined in terms of a matrix with values in subsets of the real line P(R). We leverage semi-ring properties of P(R) to model multi-hop communication in a TVG using matrix multiplication and a truncated Kleene star. This leads to novel statistics on the communication capacity of TVGs called lifetime curves, which we generate for large samples of randomly chosen STARLINK satellites, whose connectivity is modeled over day-long simulations. Determining when a large subsample of STARLINK is temporally strongly connected is further analyzed using novel metrics introduced here that are inspired by topological data analysis (TDA). To better model networking scenarios between the Earth and Mars, we introduce various semi-rings capable of modeling propagation delay as well as protocols common to Delay Tolerant Networking (DTN), such as store-and-forward. Finally, we illustrate the applicability of zigzag persistence for featurizing different space networks and demonstrate the efficacy of K-Nearest Neighbors (KNN) classification for distinguishing Earth-Mars and Earth-Moon satellite systems using time-varying topology alone.
A Geometric Approach to the Kinematics of the Canfield Joint
May 12, 2021



This paper details an accessible geometric derivation of the forward and inverse kinematics of a parallel robotic linkage known as the Canfield joint, which can be used for pointing applications. The original purpose of the Canfield joint was to serve as a human wrist replacement, and it can be utilized for other purposes such as the precision pointing and tracking of antennas, telescopes, and thrusters. We build upon previous analyses, and generalize them to include the situation where one of the three legs freezes; the kinematics are also substantially generalized beyond failure modes, detailed within. The core of this work states and clarifies the assumptions necessary to analyze this type of parallel robotic linkage. Specific guidance is included for engineering use cases.
A Topological Kinematic Workspace Analysis of the Canfield Joint
Sep 06, 2018



We use topological techniques to do a workspace analysis of the Canfield Joint, a mechanical linkage constructed with two plates connected by three legs. The Canfield Joint has three degrees of freedom and can be controlled using three actuators attached to the base in strategic positions. In the process of performing the workspace analysis, we describe a new method of controlling the Joint which includes elements of both forward and inverse kinematics. This control process is then used to answer the question of how the workspace of the joint changes in the possibility of a failure mode where one degree of freedom is lost.