 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-aligned Spatial Feature Extraction Network for UAV Vehicle Re-identification
Jan 08, 2022
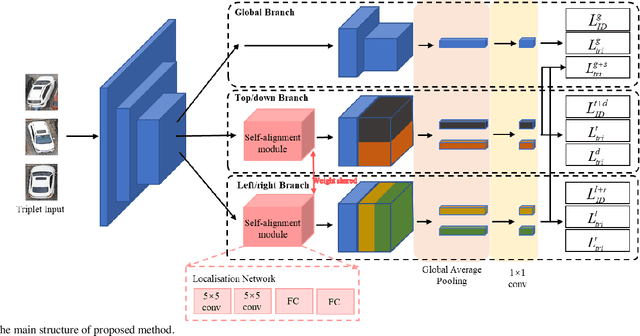
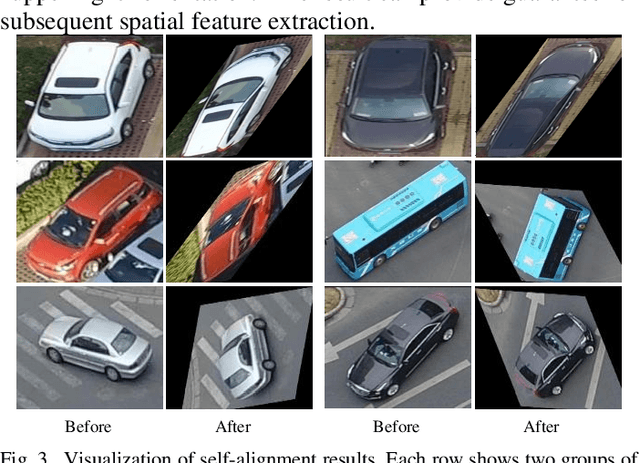
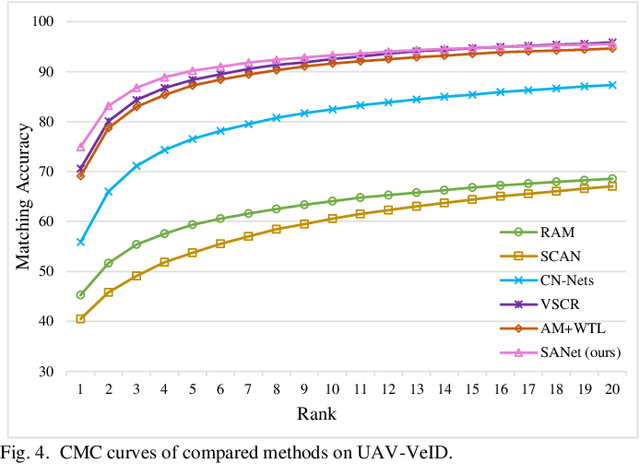
Compared with existing vehicle re-identification (ReID) tasks conducted with datasets collected by fixed surveillance cameras, vehicle ReID for unmanned aerial vehicle (UAV) is still under-explored and could be more challenging. Vehicles with the same color and type show extremely similar appearance from the UAV's perspective so that mining fine-grained characteristics becomes necessary. Recent works tend to extract distinguishing information by regional features and component features. The former requires input images to be aligned and the latter entails detailed annotations, both of which are difficult to meet in UAV application. In order to extract efficient fine-grained features and avoid tedious annotating work, this letter develops an unsupervised self-aligned network consisting of three branches. The network introduced a self-alignment module to convert the input images with variable orientations to a uniform orientation, which is implemented under the constraint of triple loss function designed with spatial features. On this basis, spatial features, obtained by vertical and horizontal segmentation methods, and global features are integrated to improve the representation ability in embedded space. Extensive experiments are conducted on UAV-VeID dataset, and our method achieves the best performance compared with recent ReID works.