 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Radar Imaging Based on Accelerated ADMM
Jul 17, 2023The ability of widely distributed radar systems to capture diverse spatial scattering properties substantially improves radar imaging performance. Traditional imaging methods leverage regularized optimization techniques to reconstruct sparse images from local sensors and later combine them to create a global image. Alternatively, we proposed in an earlier work a joint reconstruction technique based on two problem formulations according to the optimization framework of the Alternating Direction Method of Multipliers (ADMM). The joint reconstruction of the global image offers faster convergence, flexible implementation, and a general distributed reconstruction framework. However, despite its benefits, ADMM framework still exhibits a slow convergence rate, making its employment in some contexts impractical. In this paper, we introduce a heuristic method to accelerate the convergence of the previously proposed ADMM formulations based on the gradual elimination of the already converged pixels in accordance with a predetermined criterion. In addition to reducing running time, the accelerated implementation offers reduced computational complexity and lower communication cost between the sensors during iterative updates.
Widely Distributed Radar Imaging: Unmediated ADMM Based Approach
Mar 10, 2022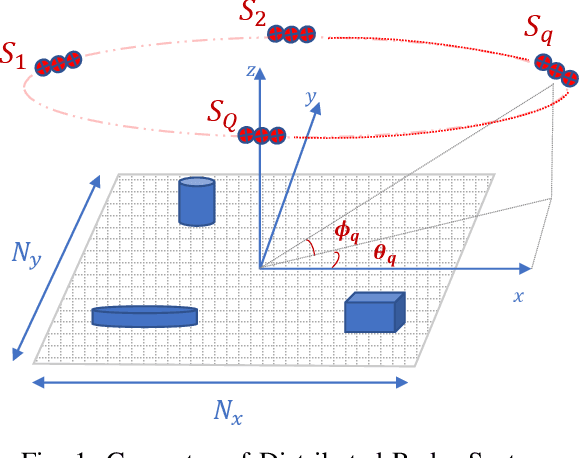
In this paper, we present a novel approach to reconstruct a unique image of an observed scene with widely distributed radar sensors. The problem is posed as a constrained optimization problem in which the global image which represents the aggregate view of the sensors is a decision variable. While the problem is designed to promote a sparse solution for the global image, it is constrained such that a relationship with local images that can be reconstructed using the measurements at each sensor is respected. Two problem formulations are introduced by stipulating two different establishments of that relationship. The proposed formulations are designed according to consensus ADMM (CADMM) and sharing ADMM (SADMM), and their solutions are provided accordingly as iterative algorithms. We drive the explicit variable updates for each algorithm in addition to the recommended scheme for hybrid parallel implementation on the distributed sensors and a central processing unit. Our algorithms are validated and their performance is evaluated exploiting Civilian Vehicles Dome data-set to realize different scenarios of practical relevance. Experimental results show the effectiveness of the proposed algorithms, especially in cases with limited measurements.