Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Collaboration System Setup for Weed Harvesting Scenarios in Aquatic Lakes
Oct 23, 2024
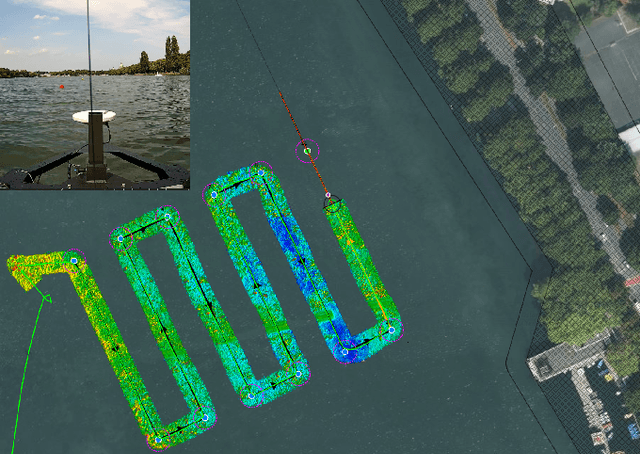


Artificial Water Bodies (AWBs) are human-made and require continuous monitoring due to their artificial biological processes. These systems necessitate regular maintenance to manage their ecosystems effectively. Unmanned Surface Vehicle (USV) offers a collaborative approach for monitoring these environments, working alongside human operators such as boat skippers to identify specific locations. This paper discusses a weed harvesting scenario, demonstrating how human-robot collaboration can be achieved, supported by preliminary results. The USV mainly utilises multibeam SOund NAvigation and Ranging (SONAR) for underwater weed monitoring, showing promising outcomes in these scenarios.
* 3 pages, 5 figures. This paper was accepted for poster presentation
at IROS 2024 Workshop on Maritime Heteregenous Unmanned Robotic Systems
(MHURS)
Via