 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePropagation and Rate-Aware Cell Switching Optimization in HAPS-Assisted Wireless Networks
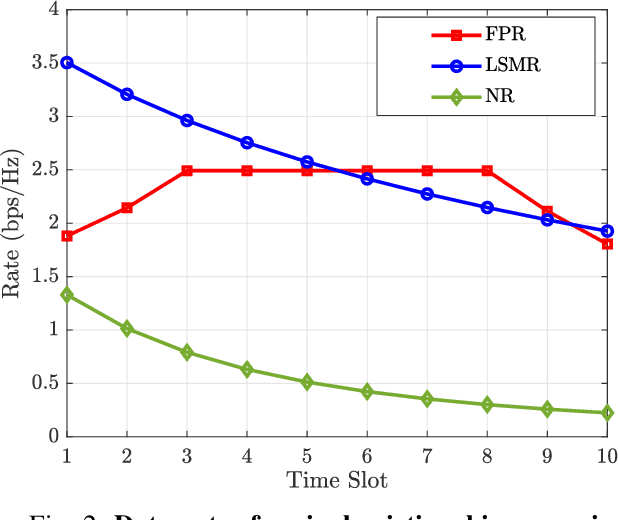
Mar 11, 2026Cell switching is a promising approach for improving energy efficiency in wireless networks; however, existing studies largely rely on simplified models and energy-centric formulations that overlook key performance-limiting factors. This paper revisits the cell switching concept by redefining its modeling assumptions and mathematical formulation, explicitly incorporating realistic propagation effects such as building entry loss (BEL) and atmospheric losses relevant to non-terrestrial networks (NTN), particularly high-altitude platform station (HAPS). Beyond proposing a new cell switching strategy, the conventional energy-focused problem is reformulated as a multi-objective optimization framework that jointly minimizes power consumption, unconnected users, and data rate degradation. Through this reformulation, the proposed methods ensure that energy-efficient operation is achieved without compromising user connectivity and data rate performance, thereby inherently supporting sustainability objectives for sixth-generation (6G) networks. To solve this reformulated problem, two complementary approaches are employed: the weighted sum method (WSM), which enables flexible and adaptive weighting mechanism, and the {ε-constraint-inspired method (εCM), which converts connectivity and rate-related objectives into constraints within the conventional energy-focused problem. Moreover, unlike prior work relying only on simulations, this study combines system-level simulations with Sionna-OpenAirInterface (OAI) based emulation on a smaller network to validate the proposed cell switching concept under realistic conditions. The results show that, compared to the conventional approach, WSM reduces rate degradation for up to 70% for high-loss indoor users and eliminates the 44% drop for low-loss indoor users.
Compressive Sensing Imaging Using Caustic Lens Mask Generated by Periodic Perturbation in a Ripple Tank
May 01, 2024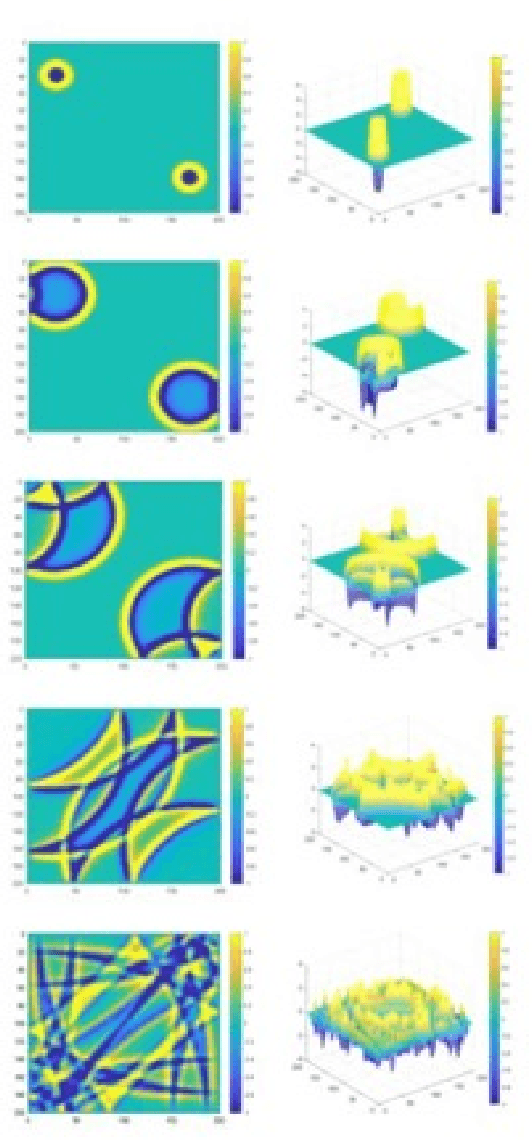

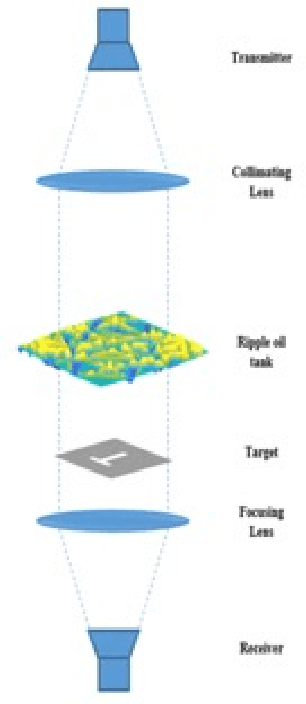
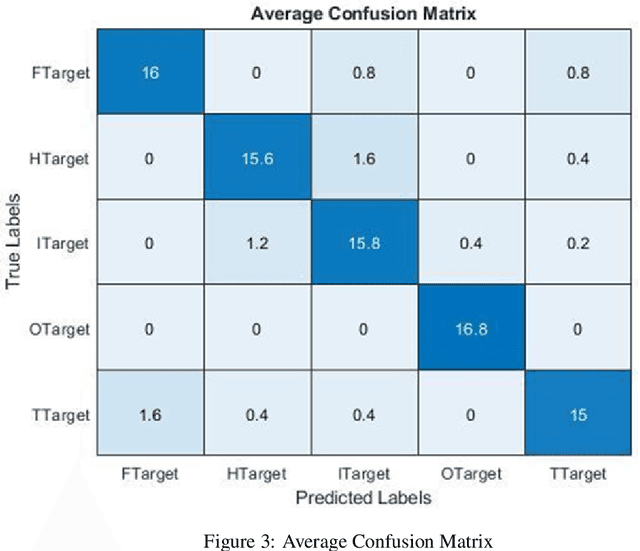
Terahertz imaging shows significant potential across diverse fields, yet the cost-effectiveness of multi-pixel imaging equipment remains an obstacle for many researchers. To tackle this issue, the utilization of single-pixel imaging arises as a lower-cost option, however, the data collection process necessary for reconstructing images is time-consuming. Compressive Sensing offers a promising solution by enabling image generation with fewer measurements than required by Nyquist's theorem, yet long processing times remain an issue, especially for large-sized images. Our proposed solution to this issue involves using caustic lens effect induced by perturbations in a ripple tank as a sampling mask. The dynamic characteristics of the ripple tank introduce randomness into the sampling process, thereby reducing measurement time through exploitation of the inherent sparsity of THz band signals. In this study, a Convolutional Neural Network was used to conduct target classification, based on the distinctive signal patterns obtained via the caustic lens mask. The suggested classifier obtained a 95.16 % accuracy rate in differentiating targets resembling Latin letters.
UAV-based Maritime Communications: Relaying to Enhance the Link Quality
Apr 17, 2023


Providing a stable connectivity in maritime communications is of utmost importance to unleash the full potential of smart ports. Nonetheless, due to the crowded nature of harbor environments, it is likely that some ships are shadowed by others, resulting in reduced received power that subsequently diminishes their data rates-even threatens basic connectivity requirements. Given that UAVs have been regarded as an integral part of future generations of wireless communication networks, they can be employed in maritime communications as well. In this paper, we investigate the use of UAV-mounted relays in order to help mitigate the reduced data rates of blocked links in maritime communications. Various communication architectures are considered based on the positioning mechanism of the UAV; in this regard, fixed, k-means algorithm-based, and landing spot-based positioning approaches are examined. On the other hand, since UAVs are predominantly battery-operated, the energy consumption performances of these approaches are also measured. Results reveal that the landing spot-based UAV relay positioning approach finds the best trade-off between the data rate and energy consumption.