 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Tracking Using Sparse Coding and Earth Mover's Distance
Paper and Code
Apr 06, 2018

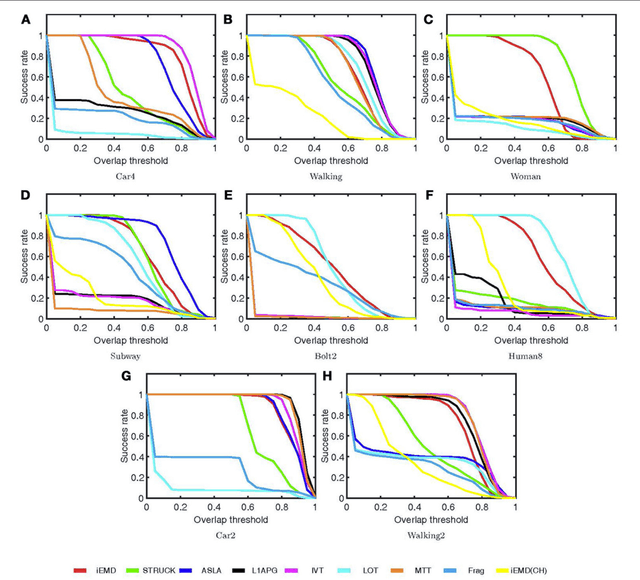
An efficient iterative Earth Mover's Distance (iEMD) algorithm for visual tracking is proposed in this paper. The Earth Mover's Distance (EMD) is used as the similarity measure to search for the optimal template candidates in feature-spatial space in a video sequence. The computation of the EMD is formulated as the transportation problem from linear programming. The efficiency of the EMD optimization problem limits its use for visual tracking. To alleviate this problem, a transportation-simplex method is used for EMD optimization and a monotonically convergent iterative optimization algorithm is developed. The local sparse representation is used as the appearance models for the iEMD tracker. The maximum-alignment-pooling method is used for constructing a sparse coding histogram which reduces the computational complexity of the EMD optimization. The template update algorithm based on the EMD is also presented. The iEMD tracking algorithm assumes small inter-frame movement in order to guarantee convergence. When the camera is mounted on a moving robot, e.g., a flying quadcopter, the camera could experience a sudden and rapid motion leading to large inter-frame movements. To ensure that the tracking algorithm converges, a gyro-aided extension of the iEMD tracker is presented, where synchronized gyroscope information is utilized to compensate for the rotation of the camera. The iEMD algorithm's performance is evaluated using eight publicly available datasets. The performance of the iEMD algorithm is compared with seven state-of-the-art tracking algorithms based on relative percentage overlap. The robustness of this algorithm for large inter-frame displacements is also illustrated.