 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
Paper and Code
Apr 22, 2022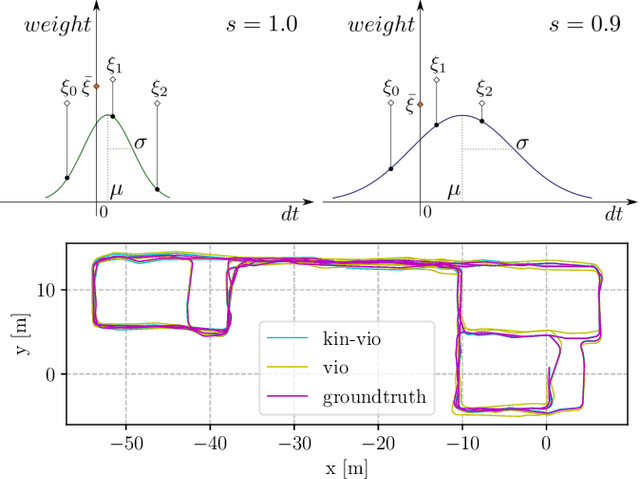
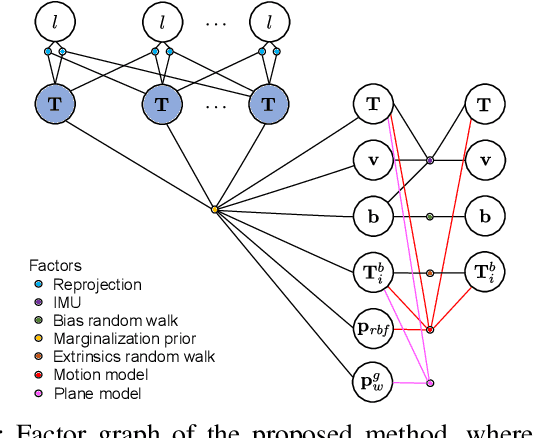
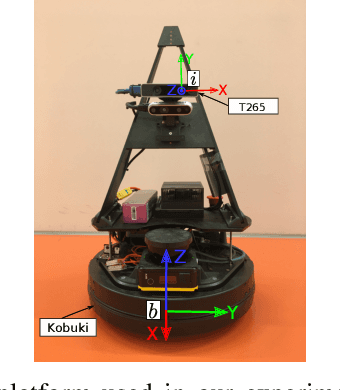
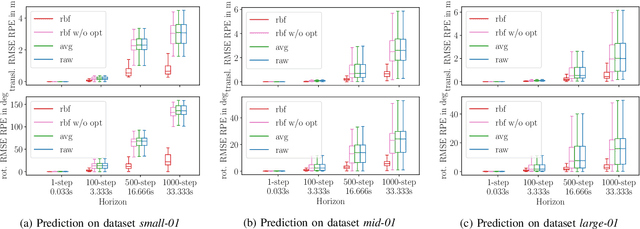
Visual-inertial odometry (VIO) is an important technology for autonomous robots with power and payload constraints. In this paper, we propose a novel approach for VIO with stereo cameras which integrates and calibrates the velocity-control based kinematic motion model of wheeled mobile robots online. Including such a motion model can help to improve the accuracy of VIO. Compared to several previous approaches proposed to integrate wheel odometer measurements for this purpose, our method does not require wheel encoders and can be applied when the robot motion can be modeled with velocity-control based kinematic motion model. We use radial basis function (RBF) kernels to compensate for the time delay and deviations between control commands and actual robot motion. The motion model is calibrated online by the VIO system and can be used as a forward model for motion control and planning. We evaluate our approach with data obtained in variously sized indoor environments, demonstrate improvements over a pure VIO method, and evaluate the prediction accuracy of the online calibrated model.