 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniform Complete Observability of Mass and Rotational Inertial Parameters in Adaptive Identification of Rigid-Body Plant Dynamics
Paper and Code
Aug 11, 2021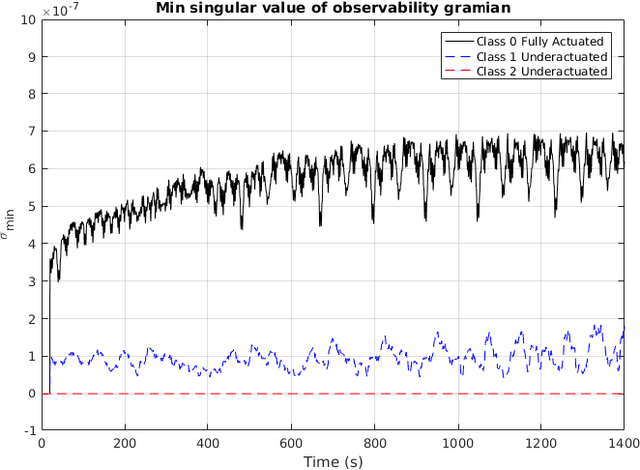
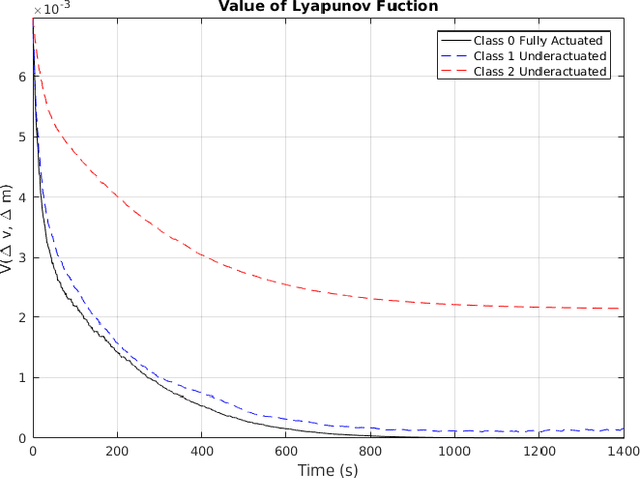
This paper addresses the long-standing open problem of observability of mass and inertia plant parameters in the adaptive identification (AID) of second-order nonlinear models of 6 degree-of-freedom rigid-body dynamical systems subject to externally applied forces and moments. Although stable methods for AID of plant parameters for this class of systems, as well numerous approaches to stable model-based direct adaptive trajectory-tracking control of such systems, have been reported, these studies have been unable to prove analytically that the adaptive parameter estimates converge to the true plant parameter values. This paper reports necessary and sufficient conditions for the uniform complete observability (UCO) of 6-DOF plant inertial parameters for a stable adaptive identifier for this class of systems. When the UCO condition is satisfied, the adaptive parameter estimates are shown to converge to the true plant parameter values. To the best of our knowledge this is the first reported proof for this class of systems of UCO of plant parameters and for convergence of adaptive parameter estimates to true parameter values. We also report a numerical simulation study of this AID approach which shows that (a) the UCO condition can be met for fully-actuated plants as well as underactuated plants with the proper choice of control input and (b) convergence of adaptive parameter estimates to the true parameter values. We conjecture that this approach can be extended to include other parameters that appear rigid body plant models including parameters for drag, buoyancy, added mass, bias, and actuators.