Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracking 6-DoF Object Motion from Events and Frames
Paper and Code
Mar 29, 2021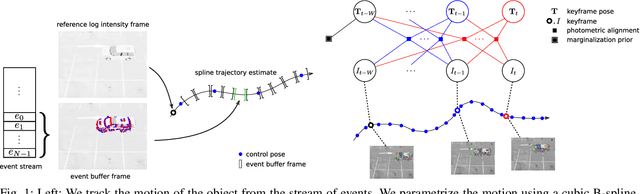



Event cameras are promising devices for lowlatency tracking and high-dynamic range imaging. In this paper,we propose a novel approach for 6 degree-of-freedom (6-DoF)object motion tracking that combines measurements of eventand frame-based cameras. We formulate tracking from highrate events with a probabilistic generative model of the eventmeasurement process of the object. On a second layer, we refinethe object trajectory in slower rate image frames through directimage alignment. We evaluate the accuracy of our approach inseveral object tracking scenarios with synthetic data, and alsoperform experiments with real data.
* Accepted by IEEE International Conference on Robotics and Automation
(ICRA) 2021
View paper on