Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards S-NAMO: Socially-aware Navigation Among Movable Obstacles
Paper and Code
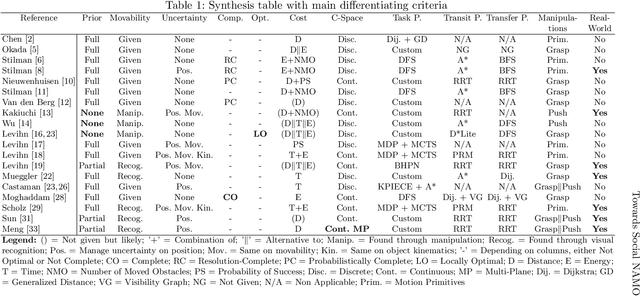

In this paper, we present an in-depth analysis of Navigation Among Movable Obstacles (NAMO) literature, notably highlighting that social acceptability remains an unadressed problem in this robotics navigation domain. The objectives of a Socially-Aware NAMO are defined and a first set of algorithmic propositions is built upon existing work. We developed a simulator allowing to test our propositions of social movability evaluation for obstacle selection, and social placement of objects with a semantic map layer. Preliminary pushing tests are done with a Pepper robot, the standard platform for the Robocup@home Social Standard Platform League, in the context of our participation (LyonTech Team).
* Robocup Symposium 2019, Jul 2019, Sydney, Australia
View paper on