 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards dynamic Narrow path walking on NU's Husky
Paper and Code
Dec 19, 2023
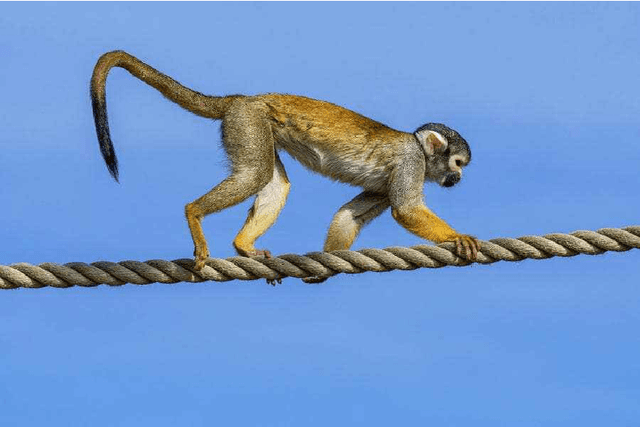
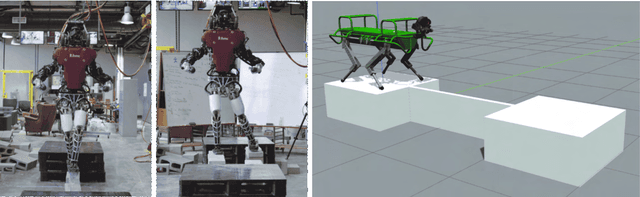
This research focuses on enabling Northeastern University's Husky, a multi-modal quadrupedal robot, to navigate narrow paths akin to various animals in nature. The Husky is equipped with thrusters to stabilize its body during dynamic maneuvers, addressing challenges inherent in aerial-legged systems. The approach involves modeling the robot as HROM (Husky Reduced Model) and creating an optimal control framework using linearized dynamics for narrow path walking. The thesis introduces a gait scheduling method to generate an open-loop walking gait and validates these gaits through a high-fidelity Simscape simulation. Experimental results of the open-loop walking are presented, accompanied by potential directions for advancing this robotic system.