 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Sample Efficient Reinforcement Learning Pipeline for Vision Based Robotics
Paper and Code
May 20, 2021
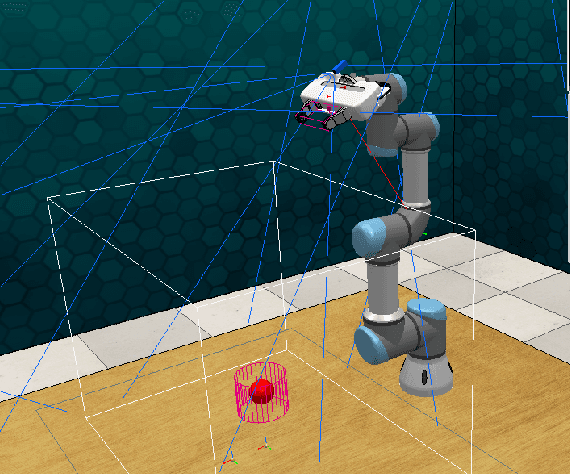
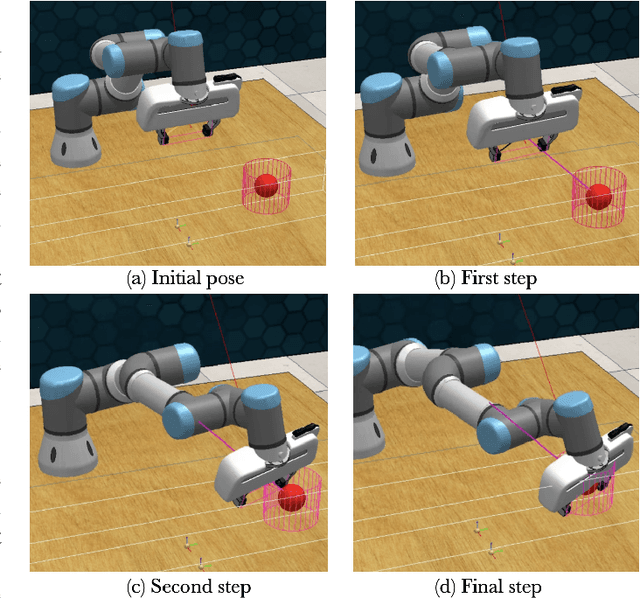
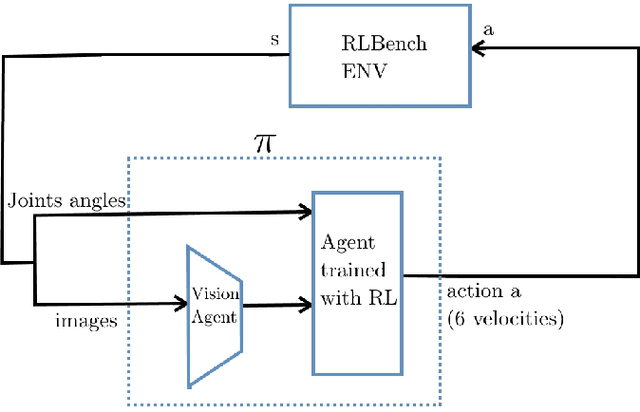
Deep Reinforcement learning holds the guarantee of empowering self-ruling robots to master enormous collections of conduct abilities with negligible human mediation. The improvements brought by this technique enables robots to perform difficult tasks such as grabbing or reaching targets. Nevertheless, the training process is still time consuming and tedious especially when learning policies only with RGB camera information. This way of learning is capital to transfer the task from simulation to the real world since the only external source of information for the robot in real life is video. In this paper, we study how to limit the time taken for training a robotic arm with 6 Degrees Of Freedom (DOF) to reach a ball from scratch by assembling a pipeline as efficient as possible. The pipeline is divided into two parts: the first one is to capture the relevant information from the RGB video with a Computer Vision algorithm. The second one studies how to train faster a Deep Reinforcement Learning algorithm in order to make the robotic arm reach the target in front of him. Follow this link to find videos and plots in higher resolution: \url{https://drive.google.com/drive/folders/1_lRlDSoPzd_GTcVrxNip10o_lm-_DPdn?usp=sharing}