 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTimeline-based Planning and Execution with Uncertainty: Theory, Modeling Methodologies and Practice
Paper and Code
May 14, 2019

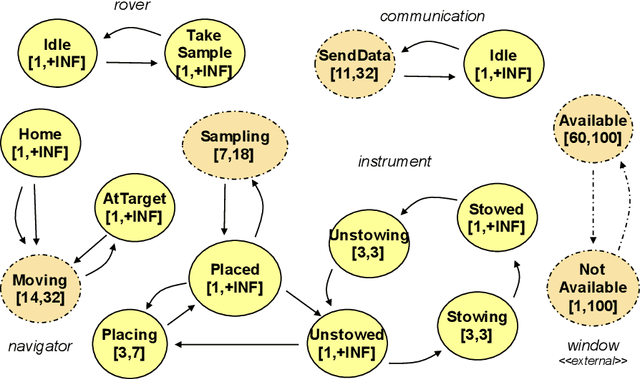

Automated Planning is one of the main research field of Artificial Intelligence since its beginnings. Research in Automated Planning aims at developing general reasoners (i.e., planners) capable of automatically solve complex problems. Broadly speaking, planners rely on a general model characterizing the possible states of the world and the actions that can be performed in order to change the status of the world. Given a model and an initial known state, the objective of a planner is to synthesize a set of actions needed to achieve a particular goal state. The classical approach to planning roughly corresponds to the description given above. The timeline-based approach is a particular planning paradigm capable of integrating causal and temporal reasoning within a unified solving process. This approach has been successfully applied in many real-world scenarios although a common interpretation of the related planning concepts is missing. Indeed, there are significant differences among the existing frameworks that apply this technique. Each framework relies on its own interpretation of timeline-based planning and therefore it is not easy to compare these systems. Thus, the objective of this work is to investigate the timeline-based approach to planning by addressing several aspects ranging from the semantics of the related planning concepts to the modeling and solving techniques. Specifically, the main contributions of this PhD work consist of: (i) the proposal of a formal characterization of the timeline-based approach capable of dealing with temporal uncertainty; (ii) the proposal of a hierarchical modeling and solving approach; (iii) the development of a general purpose framework for planning and execution with timelines; (iv) the validation{\dag}of this approach in real-world manufacturing scenarios.