 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Object Projection Feature Estimation Problem in Unsupervised Markerless 3D Motion Tracking
Paper and Code
Nov 18, 2011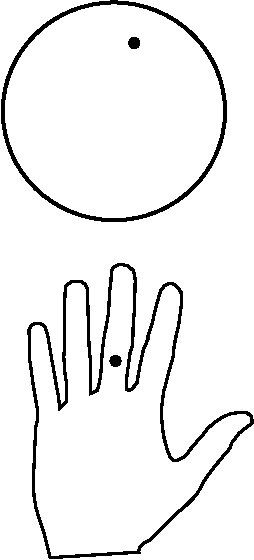
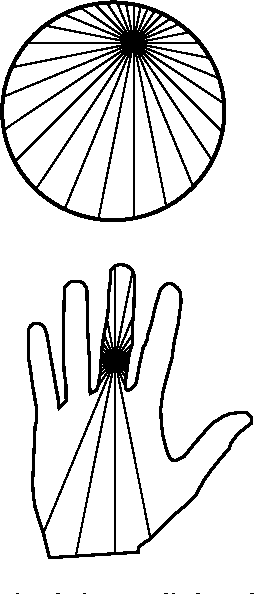

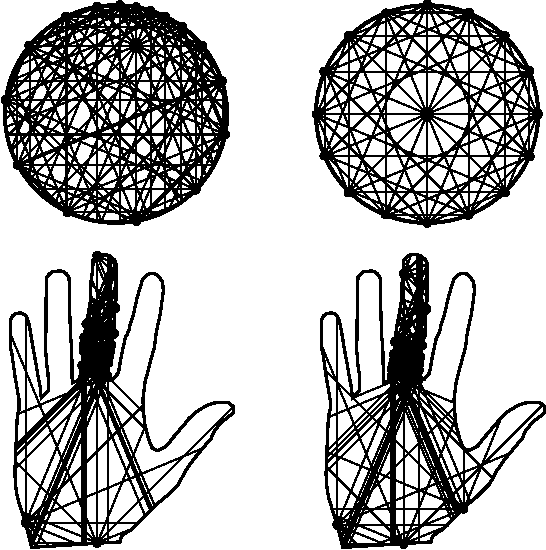
3D motion tracking is a critical task in many computer vision applications. Existing 3D motion tracking techniques require either a great amount of knowledge on the target object or specific hardware. These requirements discourage the wide spread of commercial applications based on 3D motion tracking. 3D motion tracking systems that require no knowledge on the target object and run on a single low-budget camera require estimations of the object projection features (namely, area and position). In this paper, we define the object projection feature estimation problem and we present a novel 3D motion tracking system that needs no knowledge on the target object and that only requires a single low-budget camera, as installed in most computers and smartphones. Our system estimates, in real time, the three-dimensional position of a non-modeled unmarked object that may be non-rigid, non-convex, partially occluded, self occluded, or motion blurred, given that it is opaque, evenly colored, and enough contrasting with the background in each frame. Our system is also able to determine the most relevant object to track in the screen. Our 3D motion tracking system does not impose hard constraints, therefore it allows a market-wide implementation of applications that use 3D motion tracking.