 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe impact of varying electrical stimulation parameters on neuromuscular response
Paper and Code
Dec 03, 2021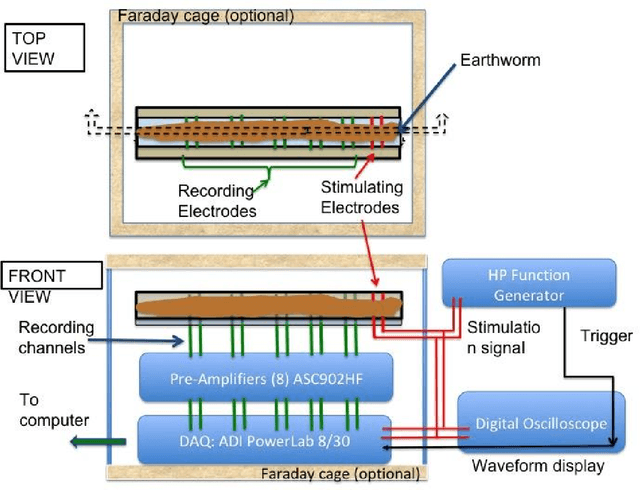
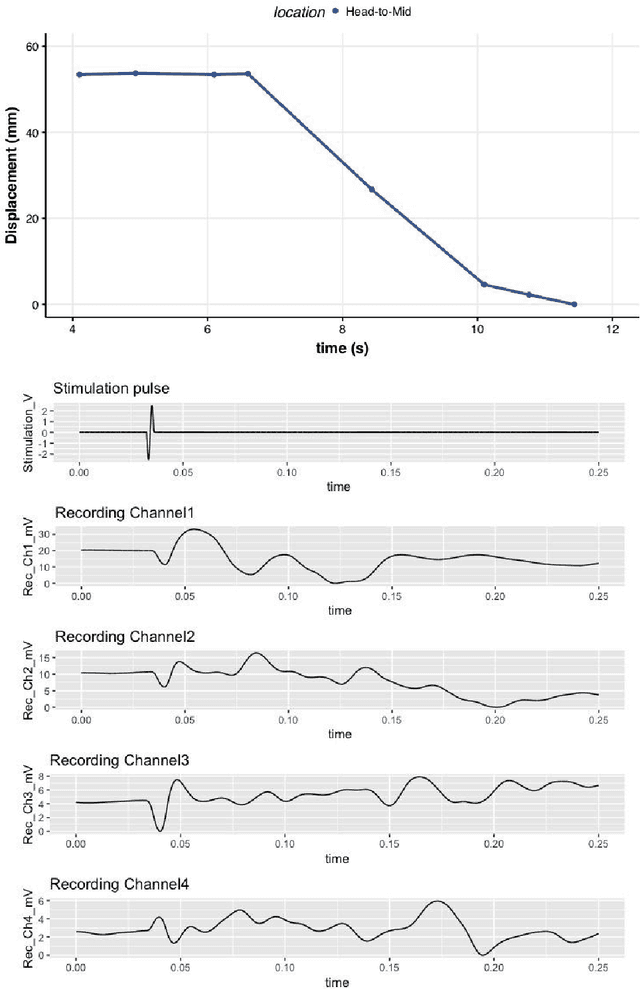
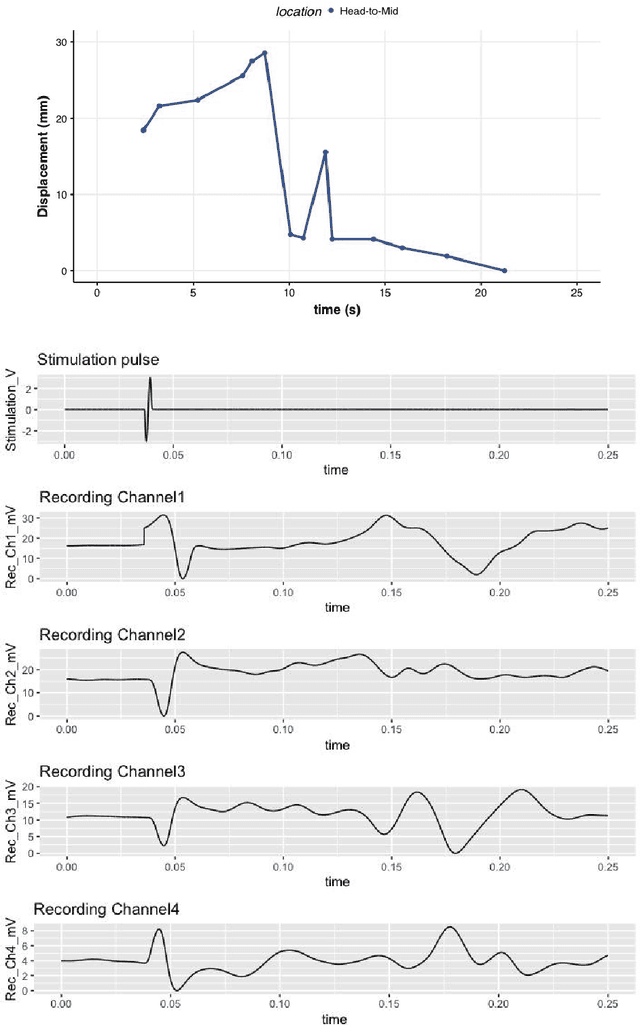
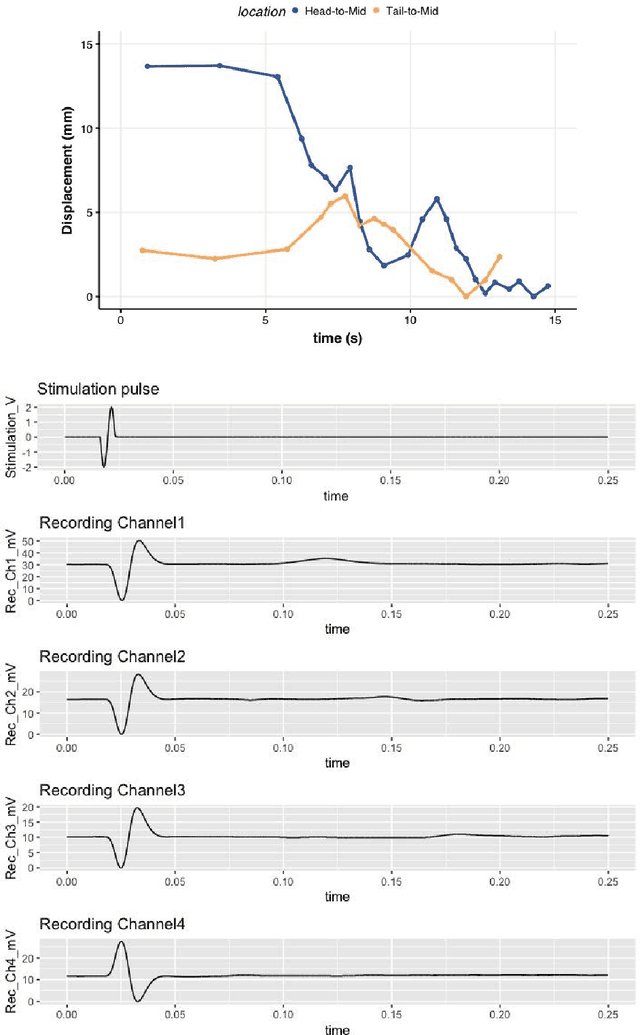
High density neurostimulation systems are coming to market to help spinal cord injury patients by stimulating and recording neuromuscular function. However, the parameter space that these systems have to explore is exceedingly large, and would need an artificial intelligence (AI) system to optimize. We need a platform that will allow us to determine the optimal parameter space for these systems. Our project aims to build a platform for mapping and controlling neuromuscular activity, as a high-throughput testbed for implementing and testing closed-loop neuromuscular activity. This abstract presents the first phase (the mapping phase) of building that testbed by combining multi-electrode stimulation/recording with visual motion-tracking. A 3D-printed rectangular raceway was used with 4 pairs of differential recording electrodes, and two stimulation electrodes embedded in the raceway bed. Non-anesthetized earthworms were placed on the raceway with their head section on the stimulating electrodes. Bipolar sinusoidal stimulation pulses of a range of voltages (2 to 6Vp-p), pulse durations (2 ms to 6.7 ms), and a burst rate of 1 pulse per second were applied, and action potentials and physical motion were recorded and analyzed. Action potentials were found to correlate with expansion/contraction displacements of worm segments, and voltage increases were shown to increase action potential propagation amplitude. Using the multiple electrode recording allowed us to capture the wave propagation of action potential pulse over the length of the worm. Feasibility of a platform to simultaneously monitor action potentials and motion of earthworms with real-time mapping was demonstrated.