Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal Autoencoder with U-Net Style Skip-Connections for Frame Prediction
Paper and Code
Nov 25, 2020
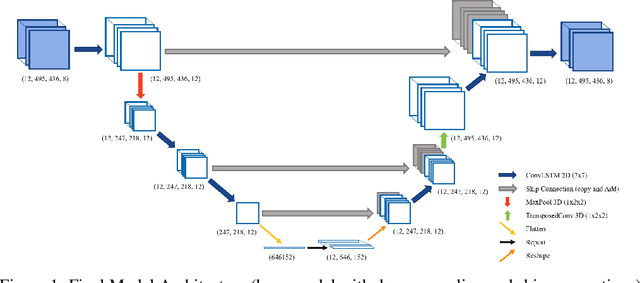
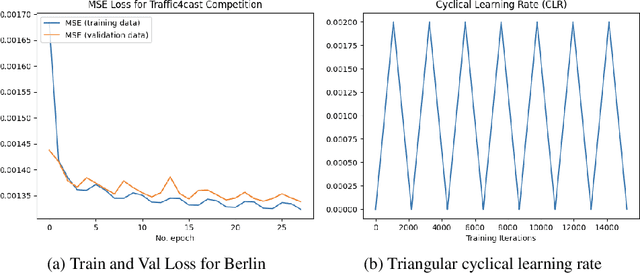

Finding sustainable and novel solutions to predict city-wide mobility behaviour is an ever-growing problem given increased urban complexity and growing populations. This paper seeks to address this by describing a traffic frame prediction approach that uses Convolutional LSTMs to create a Temporal Autoencoder with U-Net style skip-connections that marry together recurrent and traditional computer vision techniques to capture spatio-temporal dependencies at different scales without losing topological details of a given city. Utilisation of Cyclical Learning Rates is also presented, improving training efficiency by achieving lower loss scores in fewer epochs than standard approaches.
* 7 pages, 3 figures, 3 tables, 4 equations
View paper on