 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Modeling of Tag Installation Error for Robust On-Manifold Tag-Based Visual-Inertial Localization
Paper and Code
Sep 13, 2022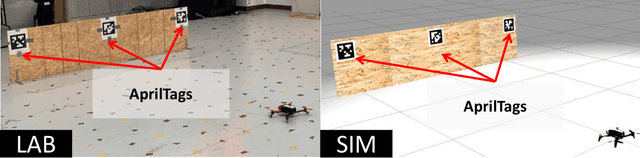


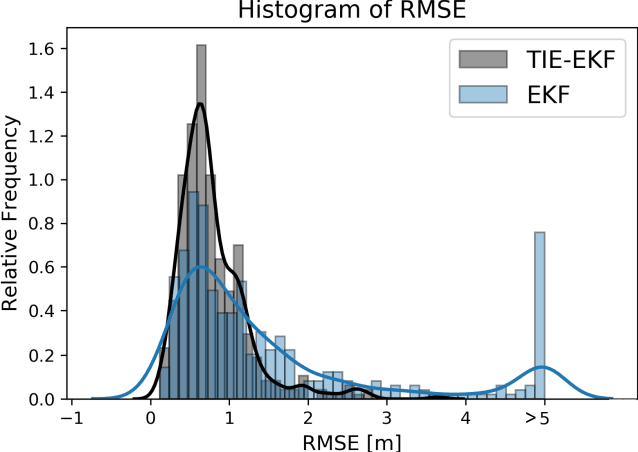
Autonomous mobile robots, including unmanned aerial vehicles (UAVs), have received significant attention for their applications in construction. These platforms have great potential to automate and enhance the quality and frequency of the required data for many tasks such as construction schedule updating, inspections, and monitoring. Robust localization is a critical enabler for reliable deployments of autonomous robotic platforms. Automated robotic solutions rely mainly on the global positioning system (GPS) for outdoor localization. However, GPS signals are denied indoors, and pre-built environment maps are often used for indoor localization. This entails generating high-quality maps by teleoperating the mobile robot in the environment. Not only is this approach time-consuming and tedious, but it also is unreliable in indoor construction settings. Layout changes with construction progress, requiring frequent mapping sessions to support autonomous missions. Moreover, the effectiveness of vision-based solutions relying on visual features is highly impacted in low texture and repetitive areas on site. To address these challenges, we previously proposed a low-cost, lightweight tag-based visual-inertial localization method using AprilTags. Tags, in this method, are paper printable landmarks with known sizes and locations, representing the environment's quasi-map. Since tag placement/replacement is a manual process, it is subject to human errors. In this work, we study the impact of human error in the manual tag installation process and propose a stochastic approach to account for this uncertainty using the Lie group theory. Employing Monte Carlo simulation, we experimentally show that the proposed stochastic model incorporated in our on-manifold formulation improves the robustness and accuracy of tag-based localization against inevitable imperfections in manual tag installation on site.