 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSome Problems of Deployment and Navigation of Civilian Aerial Drones
Paper and Code
Jun 24, 2021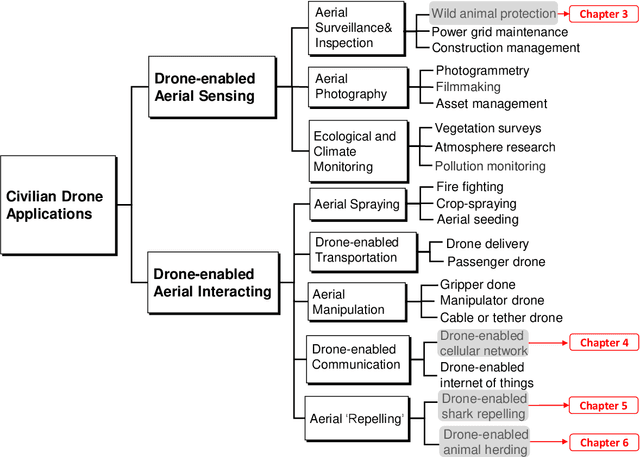


One of the biggest challenges is to determine the deployment and navigation of the drones to benefit the most for different applications. Many research questions have been raised about this topic. For example, drone-enabled wildlife monitoring has received much attention in recent years. Unfortunately, this approach results in significant disturbance to different species of wild animals. Moreover, with the capability of rapidly moving communication supply towards demand when required, the drone equipped with a base station, i.e., drone-cell, is becoming a promising solution for providing cellular networks to victims and rescue teams in disaster-affected areas. However, few studies have investigated the optimal deployments of multiple drone-cells with limited backhaul communication distances. In addition, the use of autonomous drones as flying interactors for many real-life applications has not been sufficiently discussed. With superior maneuverability, drone-enabled autonomous aerial interacting can potentially be used on shark attack prevention and animal herding. Nevertheless, previous studies of autonomous drones have not dealt with such applications in much detail. This report explores the solutions to all the mentioned research questions, with a particular focus on the deployment and navigation of the drones. Simulations have been conducted to verify the effectiveness of the proposed approaches. We believe that our findings in this report shed new light on the fundamental benefits of autonomous civilian drones.