 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving the Discrete Euler-Arnold Equations for the Generalized Rigid Body Motion
Paper and Code
Sep 01, 2021
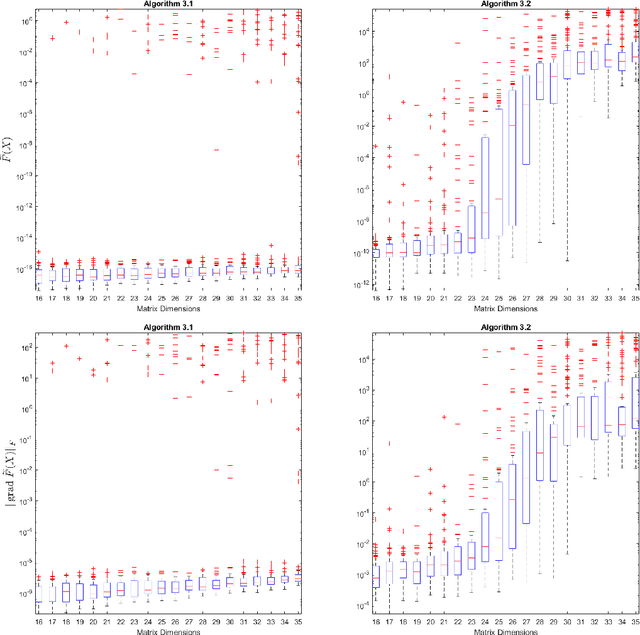
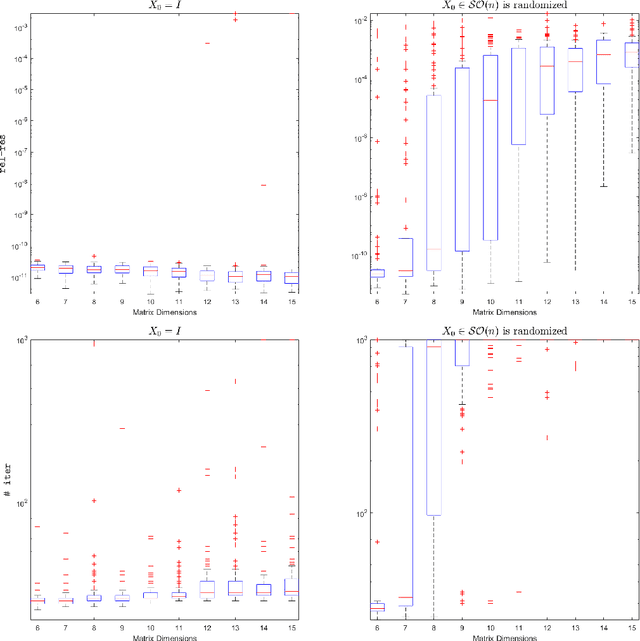
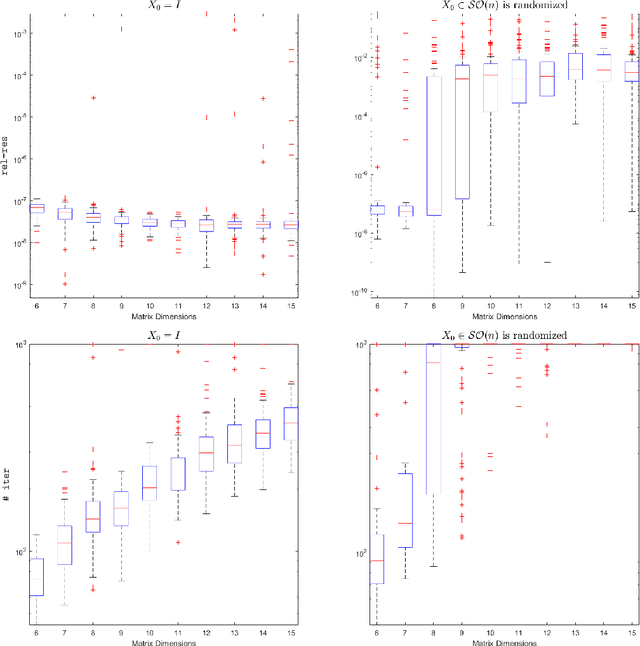
We propose three iterative methods for solving the Moser-Veselov equation, which arises in the discretization of the Euler-Arnold differential equations governing the motion of a generalized rigid body. We start by formulating the problem as an optimization problem with orthogonal constraints and proving that the objective function is convex. Then, using techniques from optimization on Riemannian manifolds, the three feasible algorithms are designed. The first one splits the orthogonal constraints using the Bregman method, whereas the other two methods are of the steepest-descent type. The second method uses the Cayley-transform to preserve the constraints and a Barzilai-Borwein step size, while the third one involves geodesics, with the step size computed by Armijo's rule. Finally, a set of numerical experiments are carried out to compare the performance of the proposed algorithms, suggesting that the first algorithm has the best performance in terms of accuracy and number of iterations. An essential advantage of these iterative methods is that they work even when the conditions for applicability of the direct methods available in the literature are not satisfied.