Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Shape Tracking of Multiple Deformable Linear Objects with Global-Local Topology Preservation
Paper and Code
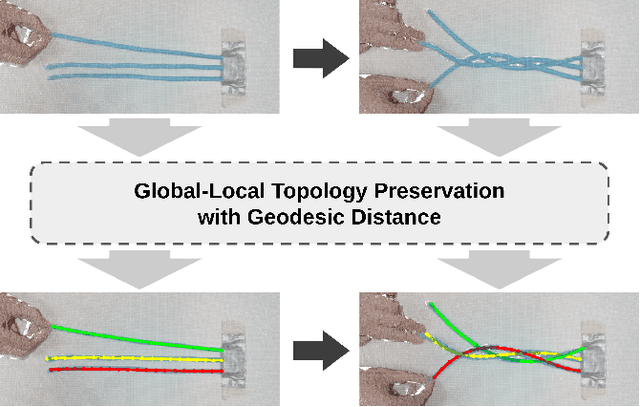
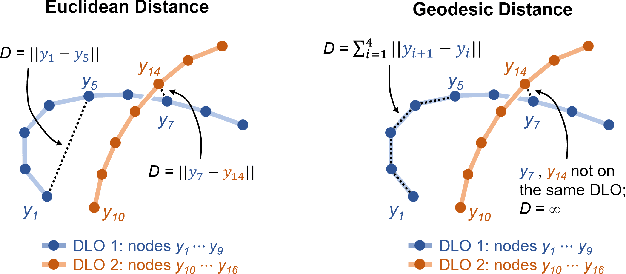
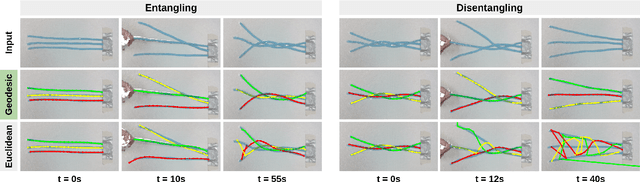
This work presents an algorithm for tracking the shape of multiple entangling Deformable Linear Objects (DLOs) from a sequence of RGB-D images. This algorithm runs in real-time and improves on previous single-DLO tracking approaches by enabling tracking of multiple objects. This is achieved using Global-Local Topology Preservation (GLTP). This work uses the geodesic distance in GLTP to define the distance between separate objects and the distance between different parts of the same object. Tracking multiple entangling DLOs is demonstrated experimentally. The source code is publicly released.
* 3 pages, 3 figures, presented at the 3rd Workshop on Representing and
Manipulating Deformable Objects at the IEEE International Conference on
Robotics and Automation. Video presentation [https://youtu.be/hfiqwMxitqA].
3rd Workshop on Representing and Manipulating Deformable Objects
[https://deformable-workshop.github.io/icra2023/]
View paper on