 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimArch: A Multi-agent System For Human Path Simulation In Architecture Design
Paper and Code
Jul 10, 2018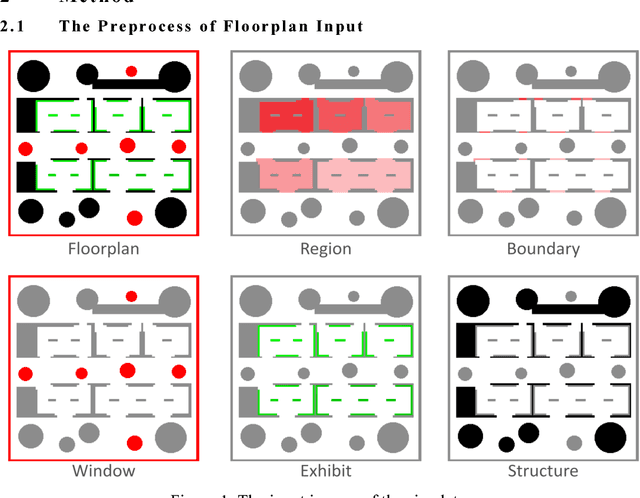
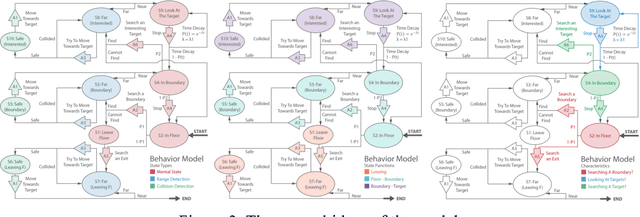
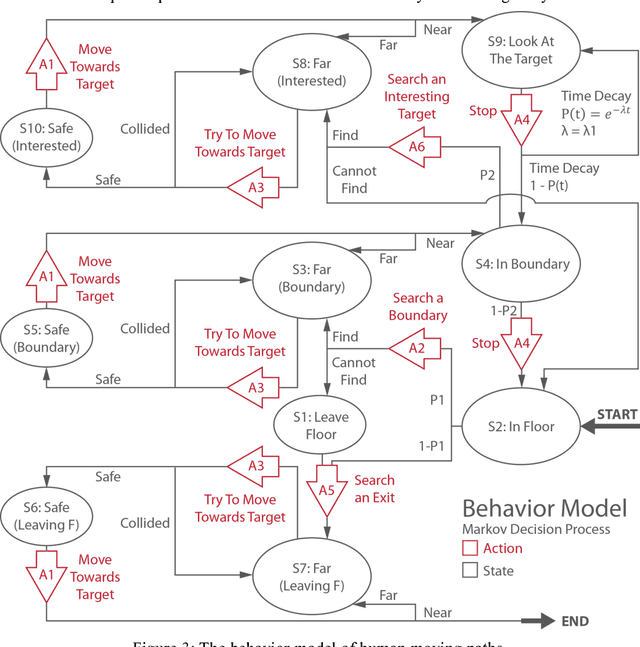
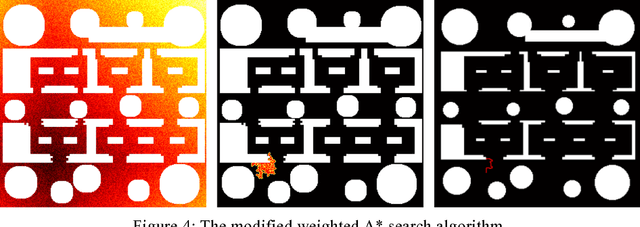
Human moving path is an important feature in architecture design. By studying the path, architects know where to arrange the basic elements (e.g. structures, glasses, furniture, etc.) in the space. This paper presents SimArch, a multi-agent system for human moving path simulation. It involves a behavior model built by using a Markov Decision Process. The model simulates human mental states, target range detection, and collision prediction when agents are on the floor, in a particular small gallery, looking at an exhibit, or leaving the floor. It also models different kinds of human characteristics by assigning different transition probabilities. A modified weighted A* search algorithm quickly plans the sub-optimal path of the agents. In an experiment, SimArch takes a series of preprocessed floorplans as inputs, simulates the moving path, and outputs a density map for evaluation. The density map provides the prediction that how likely a person will occur in a location. A following discussion illustrates how architects can use the density map to improve their floorplan design.