Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSequential Learning from Noisy Data: Data-Assimilation Meets Echo-State Network
Paper and Code
Apr 01, 2023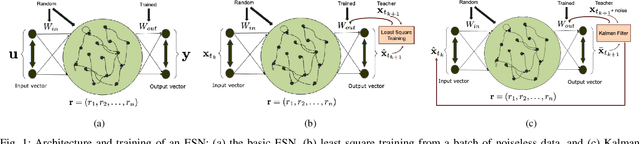
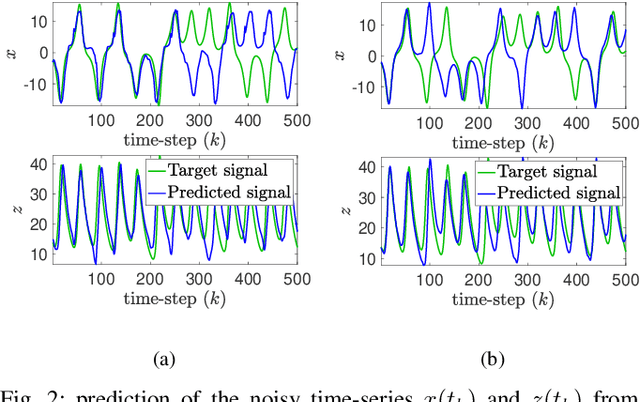
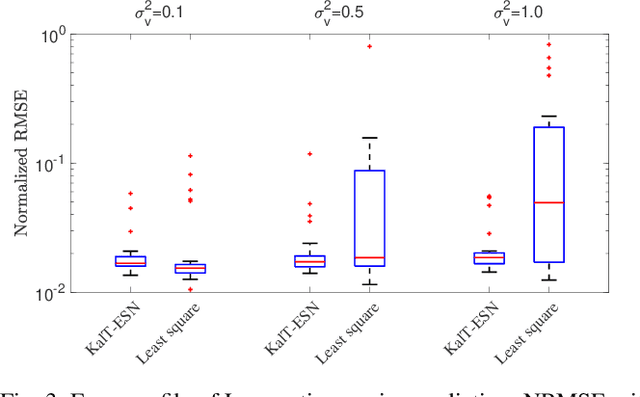
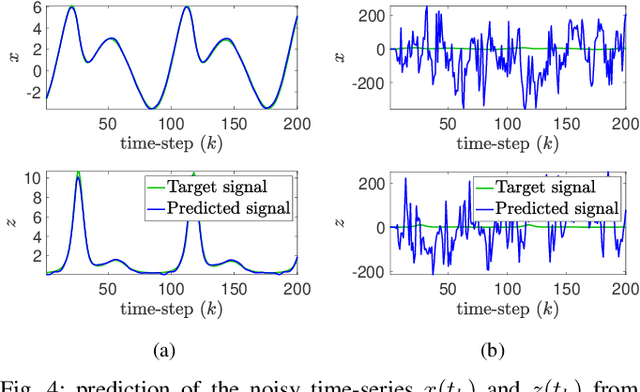
This paper explores the problem of training a recurrent neural network from noisy data. While neural network based dynamic predictors perform well with noise-free training data, prediction with noisy inputs during training phase poses a significant challenge. Here a sequential training algorithm is developed for an echo-state network (ESN) by incorporating noisy observations using an ensemble Kalman filter. The resultant Kalman-trained echo-state network (KalT-ESN) outperforms the traditionally trained ESN with least square algorithm while still being computationally cheap. The proposed method is demonstrated on noisy observations from three systems: two synthetic datasets from chaotic dynamical systems and a set of real-time traffic data.
* 7 pages, 9 figures, 1 table. arXiv admin note: text overlap with
arXiv:2211.05992
View paper on