Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic video segmentation for autonomous driving
Paper and Code
Oct 28, 2020
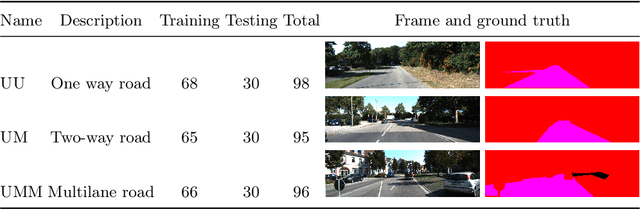
We aim to solve semantic video segmentation in autonomous driving, namely road detection in real time video, using techniques discussed in (Shelhamer et al., 2016a). While fully convolutional network gives good result, we show that the speed can be halved while preserving the accuracy. The test dataset being used is KITTI, which consists of real footage from Germany's streets.
* This work was done around 2017. Some minor changes were added
View paper on