Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf Supervised Deep Learning for Robot Grasping
Paper and Code
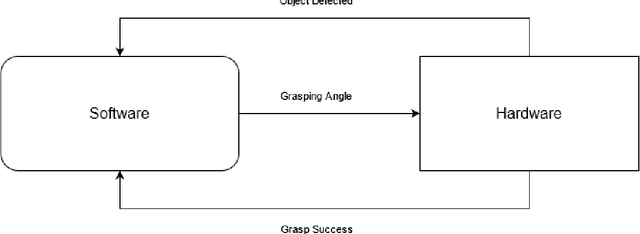
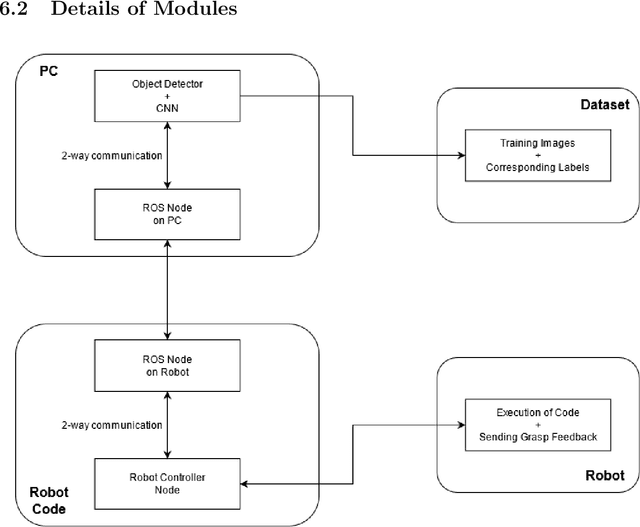
Learning Based Robot Grasping currently involves the use of labeled data. This approach has two major disadvantages. Firstly, labeling data for grasp points and angles is a strenuous process, so the dataset remains limited. Secondly, human labeling is prone to bias due to semantics. In order to solve these problems we propose a simpler self-supervised robotic setup, that will train a Convolutional Neural Network (CNN). The robot will label and collect the data during the training process. The idea is to make a robot that is less costly, small and easily maintainable in a lab setup. The robot will be trained on a large data set for several hundred hours and then the trained Neural Network can be mapped onto a larger grasping robot.
View paper on