 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe and Efficient Intersection Control of Connected and Autonomous Intersection Traffic
Paper and Code
Jan 29, 2018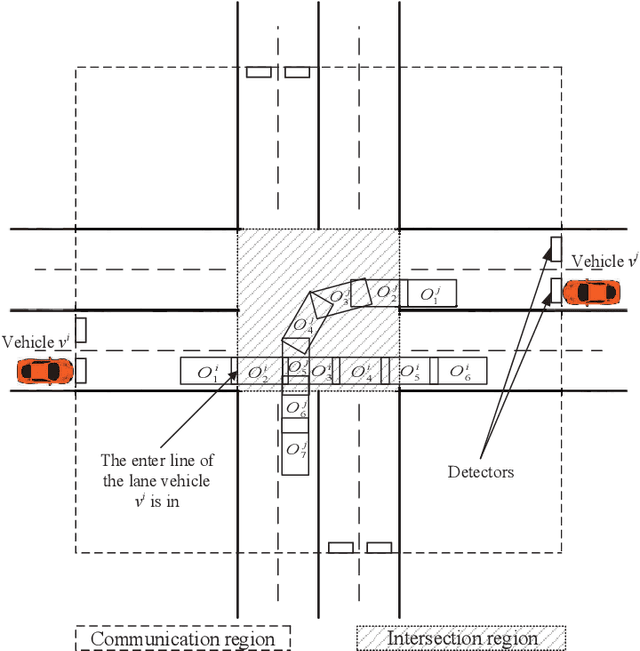
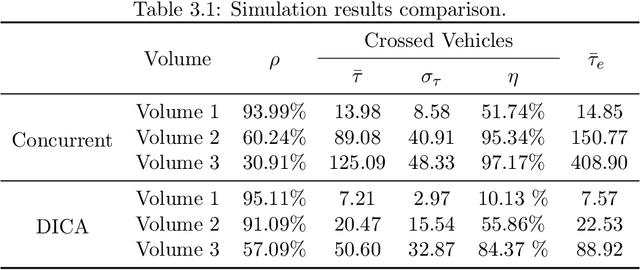
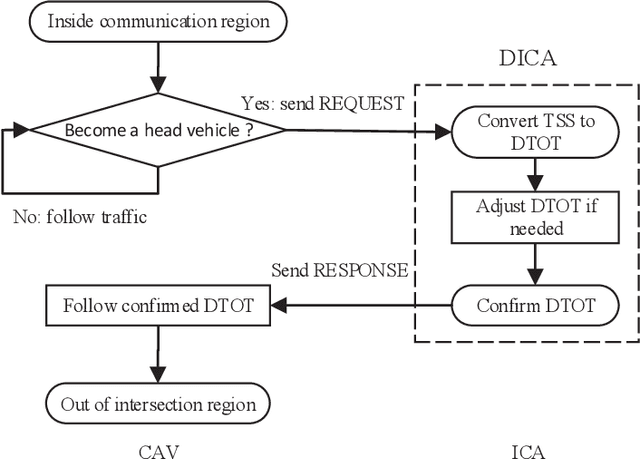
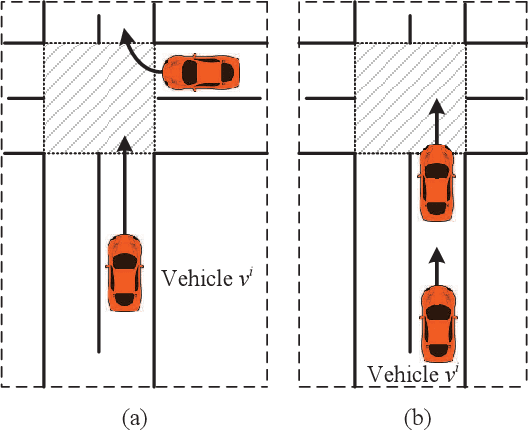
In this dissertation, we address a problem of safe and efficient intersection crossing traffic management of autonomous and connected ground traffic. Toward this objective, an algorithm that is called the Discrete-time occupancies trajectory based Intersection traffic Coordination Algorithm (DICA) is proposed. All vehicles in the system are Connected and Autonomous Vehicles (CAVs) and capable of wireless Vehicle-to-Intersection communication. In the proposed framework, an intersection coordinates the motions of CAVs based on their proposed DTOTs to let them cross the intersection efficiently while avoiding collisions. In case when there is a collision between vehicles' DTOTs, the intersection modifies conflicting DTOTs to avoid the collision and requests CAVs to approach and cross the intersection according to the modified DTOTs. We then prove that the basic DICA is deadlock free and also starvation free. We also show that the basic DICA is conservative in computational complexity and improve it by several computational approaches. Next, we addressed the problem of evacuating emergency vehicles as quickly as possible through autonomous and connected intersection traffic in this dissertation. The proposed intersection control algorithm Reactive DICA aims to determine an efficient vehicle-passing sequence which allows the emergency vehicle to cross an intersection as soon as possible while the travel times of other vehicles are minimally affected. When there are no emergency vehicles within the intersection area, the vehicles are controlled by DICA. When there are emergency vehicles entering communication range, we prioritize emergency vehicles through optimal ordering of vehicles. A genetic algorithm is proposed to solve the optimization problem which finds the optimal vehicle sequence that gives the emergency vehicles the highest priority.