 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Execution of Contact-Rich Motion Plans by Hybrid Force-Velocity Control
Paper and Code
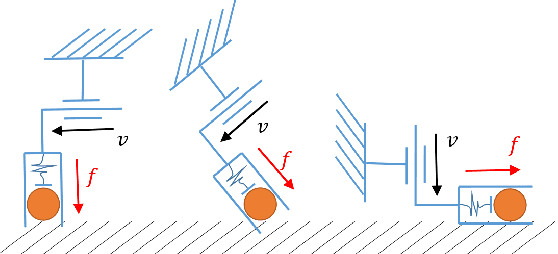
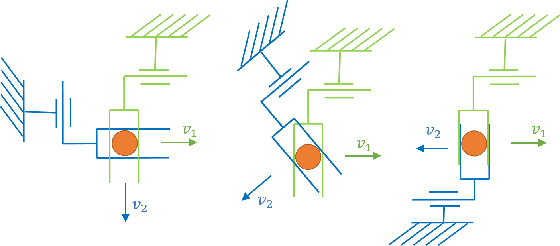
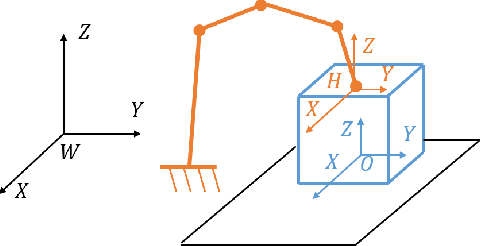
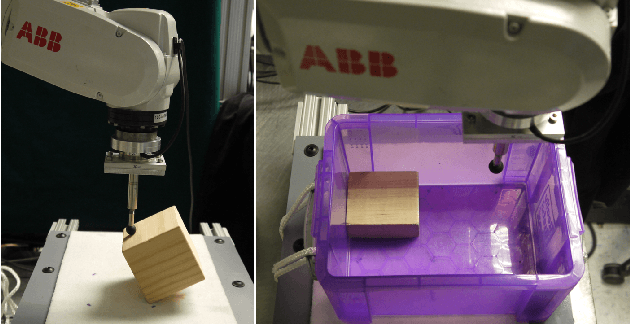
In hybrid force-velocity control, the robot can use velocity control in some directions to follow a trajectory, while performing force control in other directions to maintain contacts with the environment regardless of positional errors. We call this way of executing a trajectory hybrid servoing. We propose an algorithm to compute hybrid force-velocity control actions for hybrid servoing. We quantify the robustness of a control action and make trade-offs between different requirements by formulating the control synthesis as optimization problems. Our method can efficiently compute the dimensions, directions and magnitudes of force and velocity controls. We demonstrated by experiments the effectiveness of our method in several contact-rich manipulation tasks. Link to the video: https://youtu.be/KtSNmvwOenM.