 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Data-Driven Error Compensation for a Battery Model
Paper and Code
Dec 31, 2020
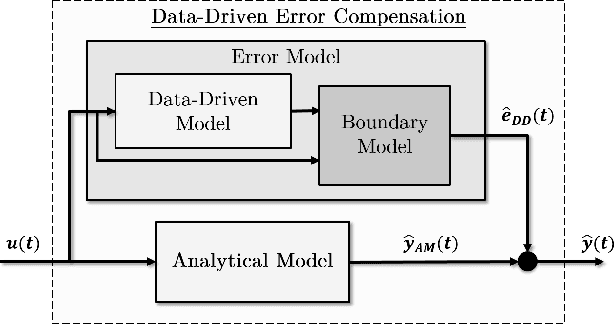
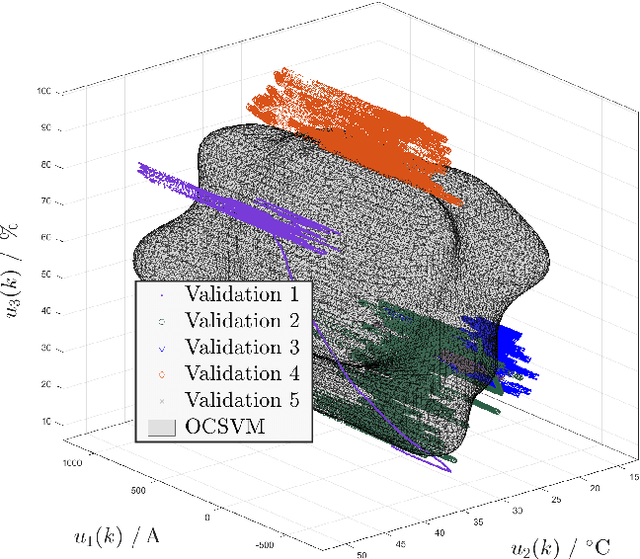
- This work has been submitted to IFAC for possible publication - Models of traction batteries are an essential tool throughout the development of automotive drivetrains. Surprisingly, today's massively collected battery data is not yet used for more accurate and reliable simulations. Primarily, the non-uniform excitation during regular battery operations prevent a consequent utilization of such measurements. Hence, there is a need for methods which enable robust models based on large datasets. For that reason, a data-driven error model is introduced enhancing an existing physically motivated model. A neural network compensates the existing dynamic error and is further limited based on a description of the underlying data. This paper tries to verify the effectiveness and robustness of the general setup and additionally evaluates a one-class support vector machine as the proposed model for the training data distribution. Based on a five datasets it is shown, that gradually limiting the data-driven error compensation outside the boundary leads to a similar improvement and an increased overall robustness.