 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Freespace Segmentation on Autonomous Robots for Detection of Obstacles and Drop-Offs
Paper and Code
Feb 03, 2019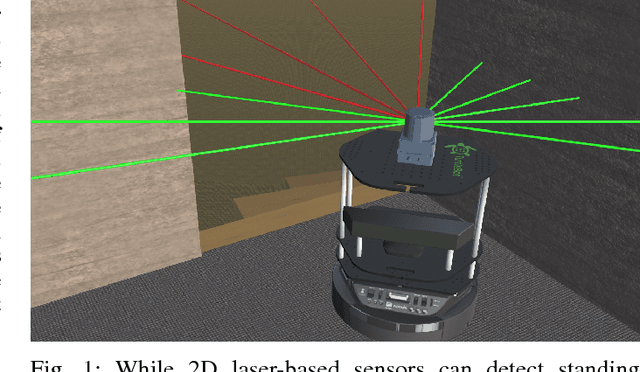

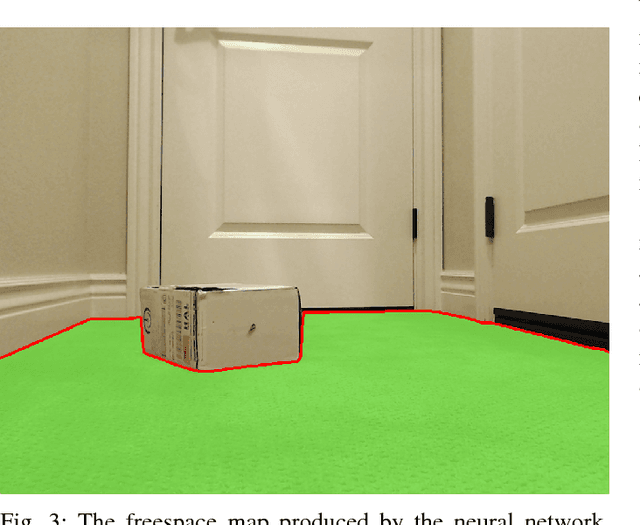
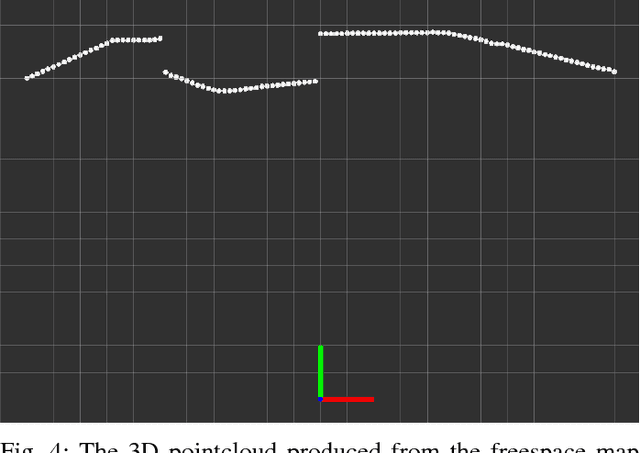
Mobile robots navigating in indoor and outdoor environments must be able to identify and avoid unsafe terrain. Although a significant amount of work has been done on the detection of standing obstacles (solid obstructions), not much work has been done on the detection of negative obstacles (e.g. dropoffs, ledges, downward stairs). We propose a method of terrain safety segmentation using deep convolutional networks. Our custom semantic segmentation architecture uses a single camera as input and creates a freespace map distinguishing safe terrain and obstacles. We then show how this freespace map can be used for real-time navigation on an indoor robot. The results show that our system generalizes well, is suitable for real-time operation, and runs at around 55 fps on a small indoor robot powered by a low-power embedded GPU.