 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePure Coordination using the Coordinator--Configurator Pattern
Paper and Code
Mar 01, 2013
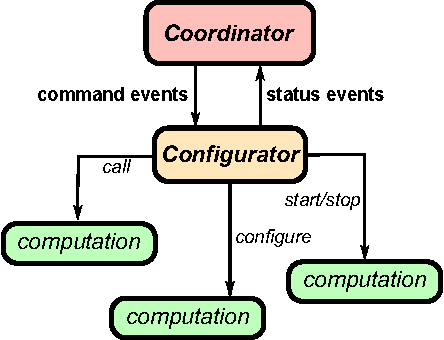
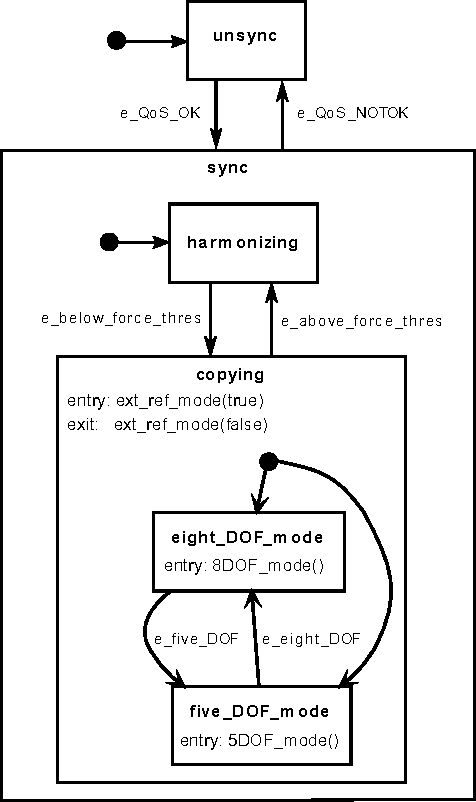
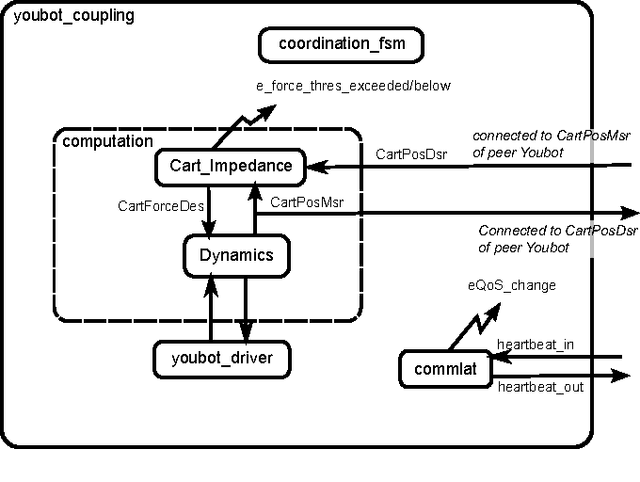
This work-in-progress paper reports on our efforts to improve different aspects of coordination in complex, component-based robotic systems. Coordination is a system level aspect concerned with commanding, configuring and monitoring functional computations such that the system as a whole behaves as desired. To that end a variety of models such as Petri-nets or Finite State Machines may be utilized. These models specify actions to be executed, such as invoking operations or configuring components to achieve a certain goal. This traditional approach has several disadvantages related to loss of reusability of coordination models due to coupling with platform-specific functionality, non-deterministic temporal behavior and limited robustness as a result of executing platform operations within the context of the coordinator. To avoid these shortcomings, we propose to split this "rich" coordinator into a Pure Coordinator and a Configurator. Although the coordinator remains in charge of commanding and reacting, the execution of actions is deferred to the Configurator. This pattern, called "Coordinator-Configurator", is implemented as a novel Configurator domain specific language that can be used together with any model of coordination. We illustrate the approach by refactoring an existing application that realizes a safe haptic coupling of two youBot mobile manipulators.