 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePreliminary Studies on Force/Motion Control of Intelligent Mechanical Systems
Paper and Code
Feb 22, 2014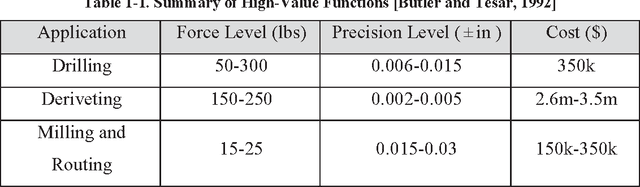
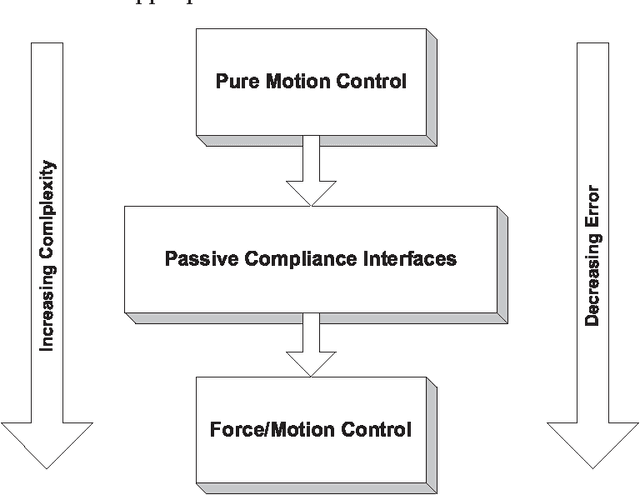
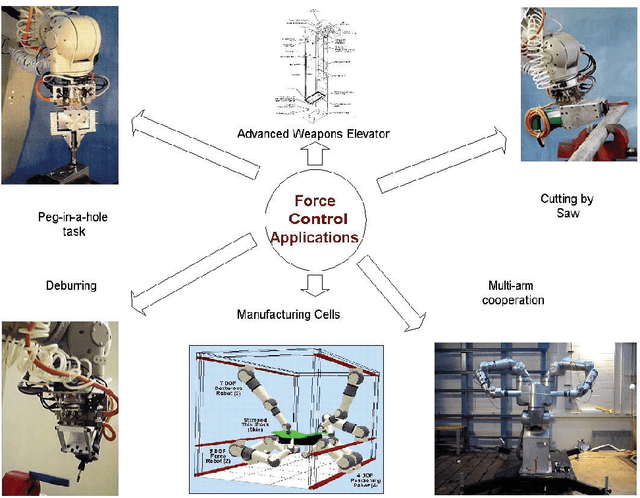
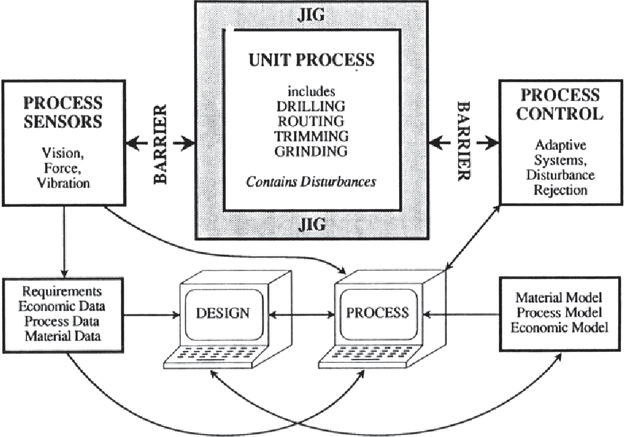
To rationalize the relatively high investment that industrial automation systems entail, research in the field of intelligent machines should target high value functions such as fettling, die-finishing, deburring, and fixtureless manufacturing. For achieving this goal, past work has concentrated on force control algorithms at the system level with limited focus on performance expansion at the actuator level. We present a comprehensive literature review on robot force control, including algorithms, specialized actuators, and robot control software. A robot force control testbed was developed using Schunk's PowerCube 6-DOF Arm and a six-axis ATI force/torque sensor. Using parameter identification experiments, manipulator module inertias and the motor torque constant were estimated. Experiments were conducted to study the practical issues involved in implementing stable contact transitions and programmable endpoint impedance. Applications to human augmentation, virtual fixtures, and teleoperation are discussed. These experiments are used as a vehicle to understand the performance improvement achievable at the actuator level. The approach at UTRRG has been to maximize the choices within the actuator to enhance its intelligence. Drawing on this 20-year research history in electromechanical actuator architecture, we propose a new concept that mixes two inputs, distinct in their velocity ratios, within the same dual actuator called a Force/Motion Actuator (FMA). Detailed kinematic and dynamic models of this dual actuator are developed. The actuator performance is evaluated using simulations with an output velocity specification and resolving input trajectories using a minimum-norm solution. It is shown that a design choice of 14:1 motion scaling between the two inputs results in good sensitivity to output force disturbances without compromising velocity tracking performance.